發布日期:2022-10-09 點擊率:60
本文介紹了包裝機溫度控制系統的工作原理,以及單神經元自適應PID算法的原理,通過對基于單神經元自適應PID算法的包裝機溫度控制子系統的調試,成功將單神經元自適應PID溫控算法移植到包裝機控制器中,試驗測試表明用該方法進行參數整定的控制系統,具有很好的自適應性和穩定性以及很高的控制精度。
包裝機,是指將具有熱塑特性的塑料復合膜經加熱軟化制成包裝容器,在一臺設備上自動完成制袋成型、填充物料、封合剪切等全過程的自動包裝設備。塑料復合膜必須加熱到一定的溫度才能軟化,所以包裝機控制器必須控制加熱設備的溫度在很小的范圍之內。雖然現在已經有很多專用的溫控模塊,但其價格往往很高,為了節約成本,本文將溫控算法移植到包裝機控制器中。
以往的溫度控制方式大多是數字PID控制,數字PID控制是一種采樣控制,它是根據采樣時刻的偏差值計算控制量,由于數字PID控制具有技術成熟、結構靈活,不需要預先確定被控對象的數學模型以及控制效果好等優點,它廣泛應用于冶金、機電、化工等行業。但數字PID控制需要預先整定三個參數,調試起來比較繁瑣,而神經元具有自學習、自適應、結構簡單、計算量小等優點,成功應用在很多系統中,故本文將神經元和數字PID的優點結合起來,采用單神經元自適應 PID算法,對包裝機溫度控制系統進行在線學習與參數整定。通過對包裝機溫度控制系統的試驗測試,調整與分析神經元的比例系數K對控制系統的影響,最后成功將其移植到包裝機控制器。
1 包裝機溫度控制系統工作原理
包裝機工作時,需要將塑料復合膜進行封口,它是通過加熱到一定溫度的2路橫封刀和2路縱封捏紙輪實現的,因此包裝機正常工作的先決條件是溫度控制在很小的范圍內。在觸摸屏上設定好加熱溫度以及上下限報警溫度后,通過ModBus通訊協議與包裝機控制器進行通訊,包裝機控制器接收到設定溫度和上下限報警溫度后,會對封刀或捏紙輪處的K型熱電偶進行溫度采集,通過包裝機控制器的控制作用,使封刀或捏紙輪處的溫度保持在很小的范圍內,具體是包裝機控制器控制輸出 PWM脈沖信號的占空比(脈沖周期固定),從而控制固態繼電器的閉合時間。固態繼電器的導通,會使封刀或捏紙輪處的加熱管接通電源,加熱封刀(固態繼電器的輸出與加熱管和交流電源相串聯)。固態繼電器在脈沖周期內的導通時間越長,溫度上升越快,當封刀或捏紙輪加熱到設定溫度后,包裝機控制器需要控制固態繼電器以特定的占空比保證加熱管接通電源,從而使封刀或捏紙輪處的溫度保持在設定溫度附近。包裝機溫度控制系統框圖如圖1所示。
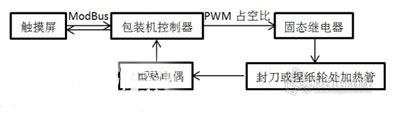
圖1 包裝機溫度控制系統框圖
圖1中的K型熱電偶所測溫度對應的電壓信號,由于是小信號,需要在包裝機控制器中設計放大電路,將小信號電壓放大到A/D轉換器能夠分辨的大電壓信號,并對K型熱電偶進行冷端補償。圖2為包裝機PID溫度控制系統方框圖。
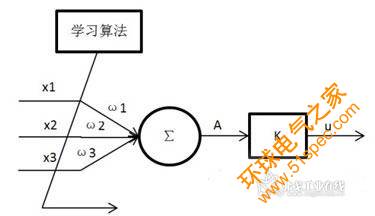
圖2 包裝機PID溫度控制系統方框圖
2 基于單神經元的自適應PID控制算法
2.1單神經元模型
圖3 單神經元模型
單神經元的輸出為:
![]()
其中,
![]()
分別對應神經元第i個輸入、第i個輸入所對應的連接權值,K為神經元的增益(比例系數),它對系統的快速跟蹤和抗干擾能力有較大的影響。神經元控制器的輸出為:
![]()
2.2 有監督的Hebb學習規則
學習規則是修正神經元之間的連接強度或加權系數的算法,使獲得的知識結構適應周圍環境的變化。單神經元控制器的自適應功能是通過學習改變連接權值來實現的。學習算法就是調整連接權值![]() 的規則,它是單神經元控制器的核心,并反映了其學習的能力。
的規則,它是單神經元控制器的核心,并反映了其學習的能力。
將無監督的Hebb學習規則和有監督的Delta學習規則兩者結合起來,就組成有監督的Hebb學習規則,即:
![]()
2.3 單神經元自適應PID控制
單神經元自適應PID控制器是通過對加權系數的調整來實現自適應、自組織功能,權系數的調整是按有監督的Hebb學習規則實現的。學習算法為:

控制算法為:
![]()

由具有自學習和自適應能力的單神經元構成的自適應PID控制器,不但結構簡單,而且能適應環境變化,有較強的魯棒性。
3 試驗測試
將單神經元自適應PID溫控算法移植到包裝機控制器MC56F8037中,實時在線采集封刀或捏紙輪加熱管處的溫度,并將其發送到觸摸屏實時顯示。溫度上下限設定為±5℃,如果封刀或捏紙輪處的溫度超出上下限將導致包裝機控制系統的報警,并產生包裝機控制系統的緊急停車,暫停包裝機的正常工作。
神經元自適應PID算法的控制量u(k)是MC56F8037PWM模塊輸出脈沖的占空比(PWM配置為Center-Aligned),即
PWM period = (PWM modulus) × (PWM clock period) × 2 (9)
PWM pulse width = (PWM value) × (PWM clock period) × 2 (10)
式(9)為PWM周期計算公式,PWMmodulus由CMOD寄存器決定,本測試設置為32767,則
PWMperiod=65534×(PWMclockperiod) (11)
而PWMvalue的變化范圍為0~32767,即控制量u(k)的變化范圍為0~32767。
比例、積分、微分的自適應學習速率分別設定為0.4、0.5、0.4。當神經元的比例系數K取值較小時,溫度緩慢上升,u(k)在0-32767之間緩慢上升,當溫度達到設定溫度后,u(k)并沒有下降,直到溫度大于設定溫度時,控制量u(k)才下降,由于K取值較小,u(k)變化緩慢,導致溫度超調過大,因此溫度會在很長時間后才會穩定下來;而K取值較大時,由于溫度偏差太大,控制器自適應學習,導致u(k)在0-32767之間反復變化,當占空比較大時,會加熱封刀,而當占空比較小時,就會導致溫度的下降,所以會出現溫度在升降中上升。
為了提高溫度的上升速度,加快整定過程,神經元的比例系數K取為10。采用在溫度低于140℃時,PWM的占空比控制在90%以上,以加快系統的穩定速度,當溫度大于140℃并且小于160℃時,PWM的占空比控制在10%到90%之間,以使神經元自適應在線學習和整定PID參數,當溫度大于160℃ 時,PWM占空比控制在0到10%,從而實現PID參數的快速整定。圖4是單通道溫控子系統的測試結果。包裝機控制器的速度已經很快,所以四路溫控連續整定沒有問題,但為了提高控制器的實時性,采用控制器每次循環只整定1路,四次循環就把四路都整定一遍,每隔1s同時改變四路的PWM占空比值,可以有效的提高PWM模塊的效率。因為當每次循環改變PWM值時,u(k)使得PWM值變化很快,固態繼電器的導通時間一直在變,會使加熱管的加熱效率變低。
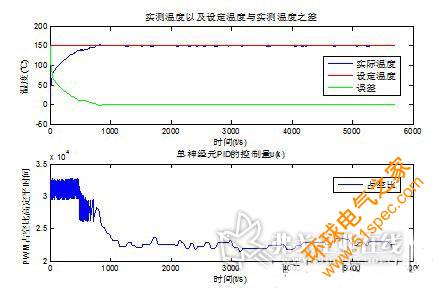
圖4 單通道溫控子系統的測試結果
圖4表明誤差能夠控制在±1℃,這是由控制器對K型熱電偶的電壓采集模塊ADC的精度以及PWM占空比分辨率決定的,如果溫度采集精度達到0.1℃并且增大PWM占空比的范圍,理論上講,誤差能夠控制在±0.1℃。
4 結論
本文實現了單神經元自適應PID算法在包裝機溫度控制子系統中的應用,并成功將其移植到包裝機控制系統中,從控制效果來看,溫度能夠保持在149℃~151℃,沒有超出設定的上下限溫度范圍,從而有效提高包裝機的控制性能,為包裝機的正常工作提供保障。
參考文獻:
[1]于鐳,常軍,黃存柱.基于DSP的自動包裝機控制系統的軟件設計[J].微型機與應用,2010(1):3~5.
[2]羊彥,景占榮,畢強等.無刷直流電動機數字PID控制的研究[J].電機與控制學報,2003,7(4):299~302.
[3]馬小霞,戴世榮,李漢舟等.陀螺數字PID溫度控制系統設計與實現[J].中國慣性技術學報,2004,12(1):66~69.
[4]孫亮,孫啟兵.神經元PID控制器在兩輪機器人控制中的應用[J].控制工程,2011,18(1):113~115.
[5]劉忠,李偉,彭金艷等.位置伺服系統的單神經元PID/CMAC控制研究[J].計算機工程與應用,2008,44(7):220~222.
[6]嚴駿,黎波,郭剛等.基于單神經元PID的挖掘機鏟斗位姿自適應控制[J].解放軍理工大學學報:自然科學版,2012,13(3):316~319.
[7]JoseR.NoriegaHW.ADirectAdaptiveNeural- networkControlforUnknownNonlinearSystemsandItsApplication[J].IEEETransactionsonNeural- network,1998,19(1):33~37.
[8]丁軍,徐用懋.單神經元自適應PID控制器及其應用[J].控制工程,2004,11(1):27~30.
[9]王旭光,孫衢.基于RBF辨識的單神經元PID調速器設計[J].自動化技術與應用,2008,27(6):57~60.
[10]張建民,王濤,王忠禮.智能控制原理及應用[M].北京:冶金工業出版社,2003:131~132.
[11]張建明,王寧,王樹青.PID自適應調整增益的神經元非模型控制[J].機電工程,1999,16(5):72~73.
[12]MicrocontrollerSolutionsGroup.56F802Xand56F803XPeripheralReferenceManualRev.3.1[Z].USA:FreescaleSemiconductor,2012:8-5~8-7.
<下一篇: PLC、DCS、FCS三大控
上一篇: 索爾維全系列Solef?PV


