當前位置: 首頁 > 工業控制產品 > 運動控制 > 工業機器人 > 直角坐標型工業機器人
發布日期:2022-04-18 點擊率:36
自從1920年捷克斯洛伐克作家卡雷爾,恰佩克的《羅薩姆的機器人萬能公司》問世,人們便對機器人充滿了幻想與期待。隨著社會的不斷發展,各行各業的分工越來越明細,機器人也能在其中扮演重要的角色來替代人們的勞動。與此同時,隨著科學技術的發展,探險、救災、排爆等危險場合工作的機器人,以及自動化生產中機器人的應用也日益廣泛。因此,智能救援機器人的研制已成為急需和必要,文章就智能救援機器人的設計進行了探討。
1、智能救援機器人的硬件設計
該智能救援機器人主要由電源模塊、檢測感應模塊(實現巡線、避障、撿放硬幣、測距功能)、聲光報警模塊、控制器模塊、電機驅動模塊、顯示模塊六部分組成,其結構框圖如圖1所示。
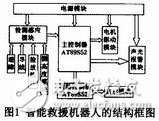
結構框圖
智能救援機器人全部能量來源于位于機器人底部的六節五號電池,經過傳統的7805穩壓電路給其單片機及外圍傳感器供電,其電路如圖2所示。部分傳感器采用5V低電壓供電可以避免機器人過早檢測障礙物而停止前進。
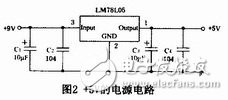
電源電路
1.2 檢測感應模塊
1.2.1 巡線電路
巡線模塊我們采用紅外對管。紅外對管由LED和光電三極管組成,光電三極管根據從地面反射回來的LED的光的強度而改變積極基極電流。在光電三極管基極接一上拉電阻,則可根據基極電壓的測量判斷反射光的強弱,強光說明探測器下方是白色,弱光說明下方光較弱,大部分光被黑線吸收。對于輸出的模擬信號,我們將其引入五個電壓比較器LM339進行處理。電壓比較器LM339的一輸入端接紅外對管,另一端接滑動變阻器,通過對滑動變阻器的調節可以實現對紅外對管對黑線的靈敏度。比較器LM339的另一端接上拉電阻后進入單片機進行探測。
1.2.2 避障電路
避障部分采用光電開關,將其安放在機器人需要測量的各個方向。為減少它的測量距離保證機器人的正常運行,我們采用的是低電壓5V供電,供電電壓雖略顯不足,但能保證它的正常短距離探測。光電開關的信號線的高低電平可反映前方障礙物的有無,障礙物檢測電路如圖3所示。
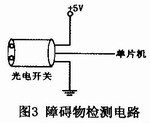
障礙物檢測電路
下一篇: PLC、DCS、FCS三大控
上一篇: 索爾維全系列Solef?PV


