發布日期:2022-04-18 點擊率:78
"通過NI公司先進的PXI技術,能夠準確而快速地對硬件進行控制和數據采集;同時,LabVIEW對其他的仿真控制軟件具有很高的開放性和兼容性,通過仿真接口工具包(SIT),能夠很方便地與Simulink進行通訊,從而實現Simulink與硬件的連接"- 李 禮夫, 華南理工大學
挑戰:
相比傳統的采用路面試驗來驗證ESP控制方法,采用基于虛擬技術的ESP測控系統可大大減低開發成本,縮短開發周期。然而目前絕大多數控制方法都采用Simulink進行開發,如何實現Simulink和實際硬件之間的控制和反饋是解決問題的關鍵。
解決方案:
使用NI公司的PXI平臺,進行相關數據信號的輸出控制和采集;使用LabVIEW進行界面的編寫,同時采用其仿真接口工具包(SIT)與Simulink進行連接,以LabVIEW為平臺,實現基于Simulink模型控制的硬件在環測控系統。
作者:
洪 兢 - 華南理工大學
李 禮夫 - 華南理工大學
介紹:
針對目前ESP常用的如邏輯門控制、普通PID控制等方法魯棒性和自適應性不強的缺陷,本文提出并在Simulink環境中建立了基于汽車橫擺角速度和質心側偏角的參數模糊自整定PID控制方法,以采用ADAMS建立的整車虛擬樣機的操縱穩定性狀況為目標,通過LabVIEW平臺,將Simulink與所開發的實際硬件進行通訊,實現對硬件的實時閉環控制,開發基于虛擬技術的ESP測控系統。
1、ESP的基本原理
汽車在高速或在低附著系數的路面上行駛時,由于受到外界干擾或駕駛員轉向作用,側向附著力常常達到附著極限,容易喪失操縱穩定性和方向穩定性,造成交通事故的發生。這正是汽車電子穩定程序(ESP)所要解決的問題。其基本原理是通過檢測汽車的行駛狀態,將其與駕駛員的期望值進行比較,來判斷汽車的穩定性,當汽車將要進入非穩定狀態時,通過調節汽車縱向制動力的大小及在車輪間的匹配來施加主動干預,阻止其進入非穩定狀態,從而改善汽車的操縱穩定性。
2、所采用的控制方法
控制策略與方法是ESP技術的核心。目前ESP所采用的控制方法主要有基于大量實驗的邏輯門控制、普通PID控制等,這些方法的控制參數一旦確定,控制邏輯就被固定,只能在汽車某些常見的工況下有效地工作,當運行條件改變時,汽車的系統特性也會隨之改變,其穩定性就不能得到保證。針對目前常用控制方法魯棒性和自適應性不強的缺陷,本文提出了基于汽車橫擺角速度和質心側偏角的參數模糊自整定PID控制方法。該方法首先檢測出汽車運行狀態(如橫擺角速度、整車質心側偏角、側向加速度等)實際值,然后由期望模型計算出汽車運動狀態的期望值,將實際值與期望值的偏差通過基于汽車橫擺角速度和質心側偏角的參數模糊自整定PID控制器,計算出所需要施加的附加橫擺力矩,再計算出單輪的制動力矩,即通過控制單輪制動力矩來達到控制汽車附加橫擺力矩并改善汽車動力學穩定性的目的。其過程如圖1所示。
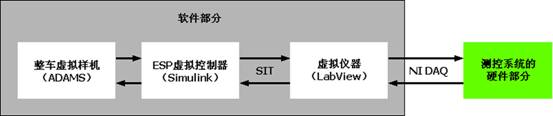
圖1 控制過程示意圖
3、ESP測控系統的開發
根據以上原理及控制方法的要求,我們選用了NI公司的PXI設備來進行數據采集和輸出控制,同時,使用ADAMS建立整車虛擬樣機,使用Simulink建立虛擬控制器,以LabVIEW作為平臺,開發了基于虛擬技術的ESP測控系統。整個系統的基本架構如圖2所示。
圖2 測控系統的基本架構
1)建立整車虛擬樣機
使用MSC ADAMS/CAR建立基于96自由度的整車虛擬樣機模型,設計參數提取和參考了2.4L排量的本田第七代雅閣轎車,其各個子系統的實體模型在動力學和運動學特性上與均實際汽車相一致,而且能夠模擬汽車的各種運動工況,向控制器輸出橫擺角速度、方向盤轉角、側向加速度的值,從而準確模擬用于測量這三個關鍵量的傳感器的功能。在本測控系統中,測試工況、路面狀況及駕駛員模型均由ADAMS/CAR提供。
2)設計ESP虛擬控制器
如前面所說,本系統采用基于汽車橫擺角速度和質心側偏角的參數模糊自整定PID控制方法,使用Simulink建立基于該控制方法的虛擬控制器,并通過ADAMS和Simulink的接口,將前面建立的整車虛擬樣機導入Simulink中,實現ESP的軟件在環。虛擬控制器里面固化了質心側偏角估算模塊、駕駛員期望的汽車行駛模型計算模塊,由整車虛擬樣機輸出的橫擺角速度、方向盤轉角、側向加速度可估算出汽車實際質心側偏角并計算出駕駛員期望橫擺角速度和質心側偏角。
3)搭建系統的汽車硬件部分
根據ESP測試系統的要求,開發并搭建了硬件在環的汽車硬件部分,如圖3所示,采用三菱FR系列變頻調速器對Y100L異步電機進行調速,模擬車輪運行的初始速度;FL-5型磁粉離合器模擬地面制動力產生的力矩,FZ-2型磁粉制動器模擬液壓制動器產生的制動力矩,扭矩傳感器將實際作用在車輪上的制動力矩采集回來。
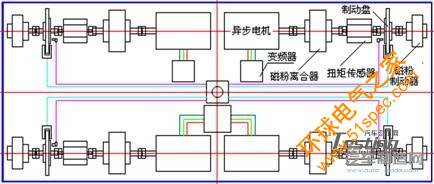
圖3 測控系統的實際硬件結構
4)與汽車硬件部分進行連接
使用LabVIEW作為平臺,通過NI的DAQ設備,就可以在一臺普通PC上靈活地搭建自己的采集和控制系統,實現軟件直接與硬件測控對象的通訊。這是實現該系統硬件在環的關鍵。
本系統采用NI公司的M系列多功能高速采集卡PXI-6259,該DAQ卡支持模擬量的采集與輸出,最大采集速率達1.25MS/s,最大輸出速率達2.8MS/s,有32個模擬量輸入通道和4個模擬量輸出通道,特別適合需要在高采樣頻率下保證高精度的數據采集應用。通過LabVIEW,用戶可以輕松地進行圖形化編程,創建數據采集程序,對硬件進行測控。輸入和輸出信號采用SCB-68據接口板與硬件連接。其中,AO0直接與變頻器連接,調節電機轉速;AO1通過WLY-3A型電流調節器與磁粉離合器連接,調節所傳遞的最大扭矩;AO2通過WLY-1A型電流調節器與磁粉制動器連接,調節所產生的制動力矩;AI0與扭矩傳感器連接,采集實際制動力矩。如圖4所示。
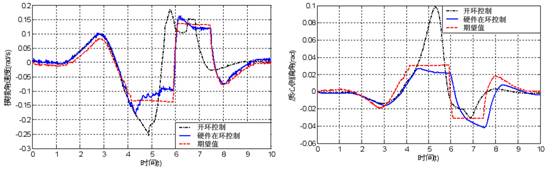
圖4 與實際硬件的連接
5)與ESP虛擬控制器連接
使用LabVIEW中的仿真接口工具包:Simulation Interface Toolkit(簡稱SIT)作為橋梁,實現LabVIEW與Simulink的連接。LabVIEW仿真接口工具包為從事控制系統設計和測試的工程師提供了LabVIEW和MathWorks Simulink?軟件之間的無縫鏈接。借助LabVIEW仿真界面工具包,用戶可創建自定義的LabVIEW界面以查看或控制運行中的Simulink模型;同時,通過LabVIEW平臺,可以方便地將Simulink模型與各種實時硬件I/O緊密集成,快速創建基于Simulink模型的控制器建模和硬件在環測試系統。
如圖5所示,將前面建立的軟件在環模型中的ESP虛擬控制器的制動力分配模塊與整車虛擬樣機之間的連接線斷開,將制動力分配模塊所輸出的各車輪的制動力矩控制信號定義為輸出口,通過SIT與LabVIEW連接,并在LabVIEW中將該信號轉換成電壓模擬信號,再通過PXI 6259和SCB-68傳給實際硬件(磁粉制動器)進行控制;同時,將整車虛擬樣機的制動力矩信號的輸入端定義為常數輸入,在LabVIEW中將PXI 6259采集回來的實際硬件(轉矩傳感器)的電壓模擬信號轉換為制動力矩信號,同樣通過SIT實時地改變這四個常數輸入的值,實現對整車虛擬樣機的制動干預。
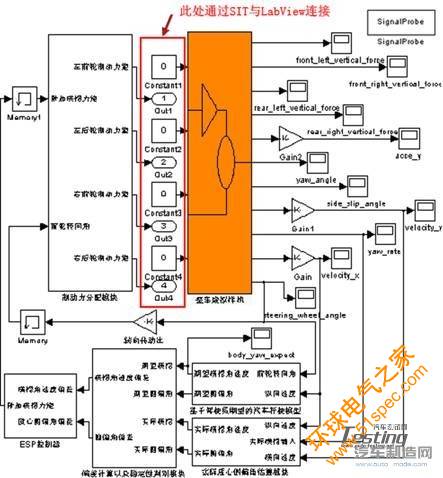
圖5 通過仿真接口工具包(SIT)將LabVIEW與Simulink連接
6)測控系統的界面
LabVIEW為用戶提供了大量虛擬儀器控件,使界面設計變得快捷和豐富多彩。本文采用LabVIEW為測試系統開發了友好的人機界面,如圖6所示。在系統運行之前,要先進行初始化設置,選擇各硬件與PXI-6259通訊所對應的通道,以及設定車輪的初始轉速和磁粉離合器的最大傳遞扭矩;開始運行后,界面右側采用標簽分別實時顯示橫擺角速度和質心側偏角的實際值和期望值、輸出及采集回來的車輪制動力矩、附加橫擺力矩等數據;運行結束時按“停止”按鈕,可自動將所有數據及各參數保存到硬盤,供后期處理與分析。整個界面簡潔易讀,操作方便。

圖6 測控系統界面
測控系統后程序面板如圖7所示。上方的循環使用DAQ Assistant負責數據采集,換算后通過SIT將數據傳遞給ESP虛擬控制器;下方的循環負責輸出,通過SIT將ESP虛擬控制器計算出來的輸出制動力矩傳到LabVIEW,換算后經過DAQ_OUT子VI輸出控制硬件。
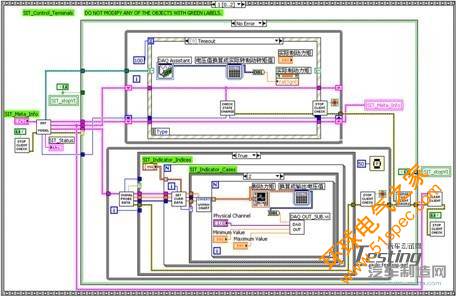
圖7 測控系統程序面板
至此,基于虛擬儀器(LabVIEW)、虛擬控制器(Simulink)和虛擬樣機(ADAMS/CAR)這三大虛擬技術的ESP測控系統已經開發完成。
4、硬件在環實驗結果分析
在所搭建的ESP測控系統中分別進行了雙移線實驗和方向盤轉角多周期正弦輸入實驗,以驗證所提出的ESP控制方法的有效性。如圖8、圖9所示,通過橫擺角速度和質心側偏角這兩個關鍵評價指標分別在硬件在環實驗、軟件在環實驗以及硬件開環實驗(無反饋控制)的結果與理想值的對比可以看出,該控制控制方法可以很好地保證汽車行駛的穩定性,具有良好的魯棒性,滿足ESP控制的要求。
圖8 雙移線實驗結果
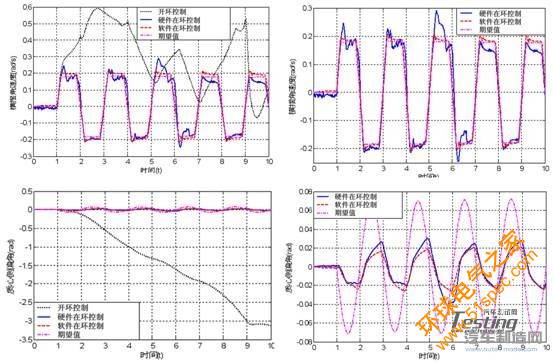
圖9 方向盤轉角多周期正弦輸入實驗結果
5、 結論
通過NI公司先進的PXI技術,能夠準確而快速地對硬件進行控制和數據采集;同時,LabVIEW對其他的仿真控制軟件具有很高的開放性和兼容性,通過仿真接口工具包(SIT),能夠很方便地與Simulink進行通訊,從而實現Simulink與硬件的連接;本文充分發揮相關軟件在虛擬技術不同領域的優勢,實現了虛擬儀器(LabVIEW)、虛擬控制器(Simulink)和虛擬樣機(ADAMS/CAR)的聯合工作,以LabVIEW為平臺,開發出基于虛擬技術的ESP測控系統,并驗證了所提出的控制方法的有效性。
作者信息:
洪 兢
華南理工大學
下一篇: PLC、DCS、FCS三大控
上一篇: MATLAB和Simulink在航


