發布日期:2022-04-22 點擊率:40
目前,能源危機、環境污染問題迫在眉睫。純電動汽車具有無污染、零排放兩大優點,因此,研發和推廣純電動汽車技術是有效緩解能源危機和解決環境問題重要途徑。而對于動力總成簡單的純電動汽車來說,整車控制器(VCU)的研發十分關鍵,直接影響車輛的動力性、經濟性和安全性。目前,企業對電控系統的開發效率提出更高要求,傳統的手寫代碼開發方式, 由于開發周期較長、調試難度較大,逐漸不適用于現代電控系統的開發。因此,為了開發高性能和高效率的整車控制器,本文根據某純電動汽車的開發需求,基于“V”模式開發流程,以 Matlab/Simulink 作為開發平臺,進行整車控制器軟件開發,并進行 HIL 測試和實車驗證。
01、整車控制器軟件開發
1.1 架構
以某純電動汽車為研究平臺,基于 32 位微處理器 SPC5634 整車控制器(圖 1),根據相關通信需求和控制需求,進行控制器軟件開發。圖 2為整車控制器架構圖,主要由輸入輸出模塊、電源電路以及 CAN 通訊模塊組成。電源主要是由24V 車載蓄電池提供;輸入模塊包括檔位信號、制動信號、充電信號、加速踏板開度、制動踏板開度,以及電池電壓信號等;輸出模塊是控制繼電器,一般由 DCDC、 PTC、 PDU 及水泵繼電器等組成;CAN 通訊模塊主要作用是根據控制需求,提供整車控制器與電機控制器(MCU)、電池管理系統(BMS)、變速箱控制器(TCU)及三合一控制器(EHBS、DCDC、 EHDS)等進行信息通訊,如圖 3 所示為整車網絡拓撲結構圖。

圖1 控制器硬件
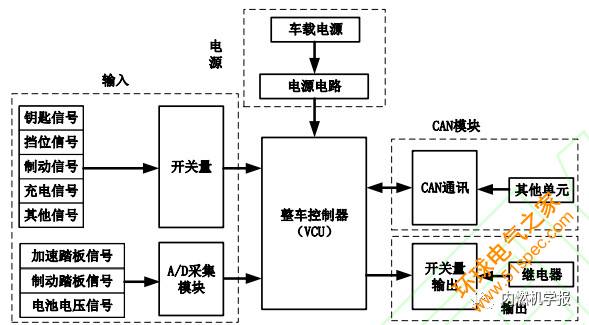
圖2 整車控制器架構圖
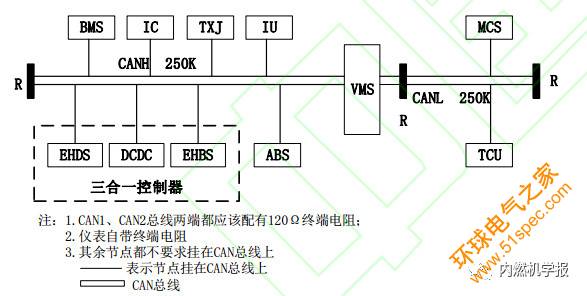
圖3 整車網絡拓撲結構圖
1.2 軟件開發
根據整車工況和動力總成狀態的不同,將整車控制模式細劃分為自檢模式、啟動模式、起步模式、行駛模式、制動模式、再生模式、停車模式、故障模式、充電模式和下電模式。并且根據各種模式的切換主要如下圖 4 所示。
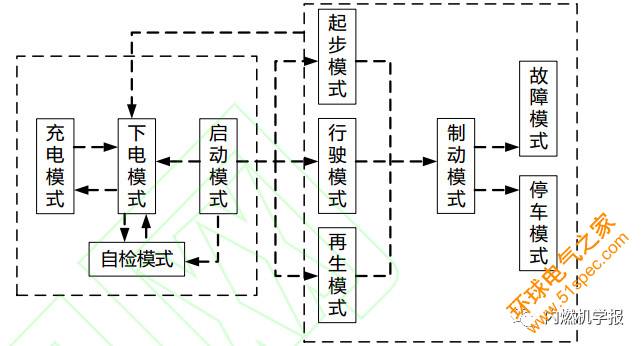 圖4 各種模式的切換
圖4 各種模式的切換
1)自檢模式
鑰匙信號置 ON 擋,整車處于上電準備階段,VCU 主接觸器閉合,進行自檢。自檢失敗則進入故障模式,反之,進入上電準備。
2)啟動模式
鑰匙信號從 OFF 擋置于 START 擋之前,確保擋位在P擋,否則無法實現正常上電。鑰匙信號置 START 擋,進行自檢模式,在沒有故障報警的情況下準備上高壓。VCU發送使能信號,CAN 總線通訊被喚醒,同時VCU將給MCS、TCU、空調控制系統等設備發送高壓上電請求,在保證無故障的條件下,將允許上高壓信號反饋給VCU主接觸器閉合,完成高壓上電,儀表將有Ready信號顯示,完成汽車啟動。
3)起步模式
車輛在無加速度下進行起步,給定一個期望電機轉矩 Start-T 作為可標定目標值,如圖 5 所示。當車速 V<V1,為克服靜止摩擦阻力,線性增加到目標轉矩;當車速 V1>V2,控制電機功率,將車速控制在合理范圍,輸出電機扭矩時進行濾波處理,實現汽車平穩起步。
4)行駛模式
滿足駕駛需求和車輛正常運行,采集加速踏板開度和整車運行狀態發送給電機控制器,進行扭矩輸出控制,包括恒扭矩和恒功率兩種方式。
5)制動模式
制動時, VCU 采集制動踏板開度信號,計算提供相應的制動扭矩,并通過 CAN 總線與電機進行通信。如圖 5 所示,根據制動踏板的狀態分為滑行再生和制動再生發電兩種情況,再生模式主要是控制電機給電池進行充電。
停車模式、故障模式、充電模式及下電模式在此不一一贅述,詳細信息請參見資料來源[1]。
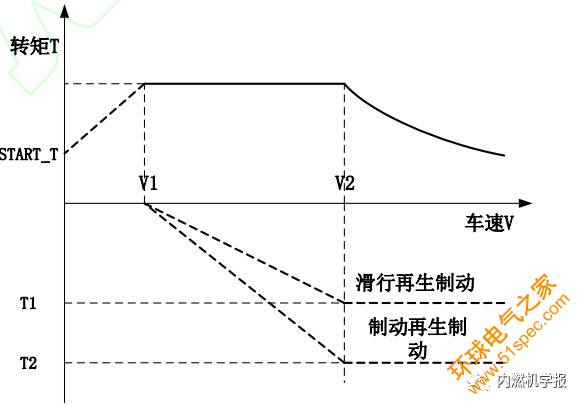
圖5 起步模式、再生制動
02、模型搭建及測試
VCU 可以采集 CAN 總線上的電池信息、變速箱狀態、電機狀態以及相應的駕駛員駕駛需求,設計出符合需求的控制策略,并利用 CAN 網絡對總線信息進行管理,滿足汽車的正常運行、停止、降功率、制動回饋控制功能的需求和故障檢測功能的實現,滿足動力性和舒適性的需求,其系統結構原理框圖主要如圖 6 所示。
圖6 系統結構原理圖
控制策略主要包含以下模塊:輸入輸出接口模塊及控制模塊,其中控制模塊包含故障處理模塊,上下電模塊,驅動電機模塊,輔件控制模塊及限速控制模塊,如 7 所示。

圖7 整車控制策略
在 Matlab/Simulink 環境下,建立整車控制策略模型,包括輸入輸出、控制算法、CAN 通訊以及基于ccp協議底層驅動模塊。并利用 Matlab/Simulink 自帶RTW工具將整車控制策略模型自動生成C代碼,嵌入相關代碼集成文件,后將生成的程序下載到整車控制器硬件系統中。并完成模型、軟件/處理器、硬件在環測試。
03、實車測試
通過程序刷寫軟件 INCA 和 value CAN,將生成的 VCU應用程序和底層應用程序加載到控制器,標定相應的加速踏板、制動踏板開度,電機實際轉速、轉矩與目標轉速、轉矩,控制模式等信號,如圖8所示。
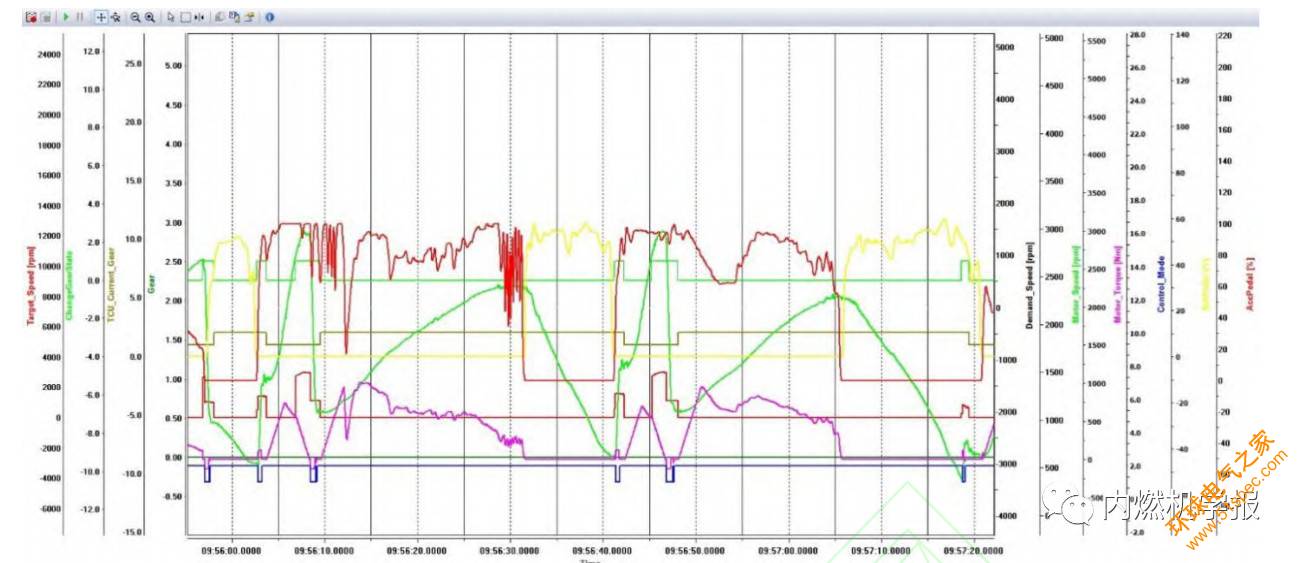
圖8 實車測試圖
實車運行時,采用 PCAN 軟件錄取整車報文并分析是否正常運行以及是否存在故障碼。關于限速功能的實車測試,通過限制電機轉速達到限速功能,當油門踏板開度保持在 100%時,電機轉速被控制低于 3500r/min,說明限速功能發揮作用。對于駐坡功能而言,加速踏板開度為 0 時,且車輛行駛在一定坡度上,電機輸出小扭矩,確保車輛不會后溜,如圖9和10所示。

圖9 限速功能測試圖
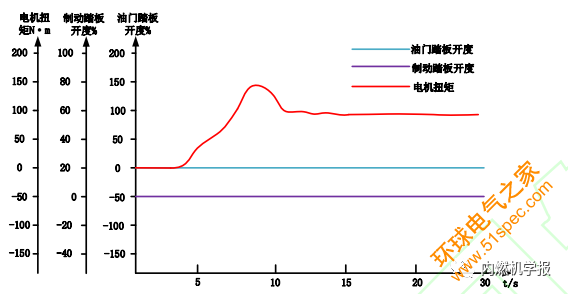
圖10 駐坡功能測試圖

資料來源及推薦閱讀
[1]鄧濤,鄧彪,宋剛.基于SPC5634的純電動汽車整車控制器軟件開發與實驗[J/OL].重慶理工大學學報(自然科學):1-7[2019-05-06].
[2] 陳春明, 夏超英. 基于 XC2268N 的純電動汽車整車控制器設計[J]. 電源學報, 2017, 15(2): 101-108.
下一篇: PLC、DCS、FCS三大控
上一篇: MATLAB和Simulink在航


