發布日期:2022-04-22 點擊率:74
關鍵詞: 并聯機械手 EtherCAT總線 ZMC控制器
摘要:簡述正運動EtherCAT總線控制器在并聯機械手上的應用,方案采用ZMC464控制器,實現3軸并聯機械手的平穩運行。
一、引言:
隨著工業技術的發展,工業機械手的功能和種類越來越豐富,其中并聯機械手也得到了廣泛的應用,特別是在物料分揀這類重復性高,強度大的功能上,與傳統的串聯機械手相比,成本低,性能高。本文主要介紹了并聯機械手結構,正運動總線控制器在三軸并聯機械手的應用以及控制過程的實現。
二、并聯機械手簡介
1.1結構組成及特點
傳統的機械手結構末端執行器與基座之間只有一條運動鏈,我們稱為串聯機械手,而并聯機械手末端執行器至少有兩條運動鏈與基座相連。根據運動鏈的條數n不同,把并聯機械手稱為n軸并聯機械手,常見的一般為3軸機械手或4軸機械手。


圖 1 三軸機械手圖 圖 2 四軸機械手
與串聯機械手相比,并聯機械手具備以下幾個優勢:
1.剛度大,多條運動鏈可以分享載荷。
2.精度高,誤差由多條運動鏈均分,不會像串聯結構那樣誤差累計。
3.運動平穩,主要部件都連接在基座,質心靠近不同的基座,所以運動慣量低。
4.成本低,結構基本都是標準件。
1.2基本參數
并聯機械手結構的基本參數定義如下圖。
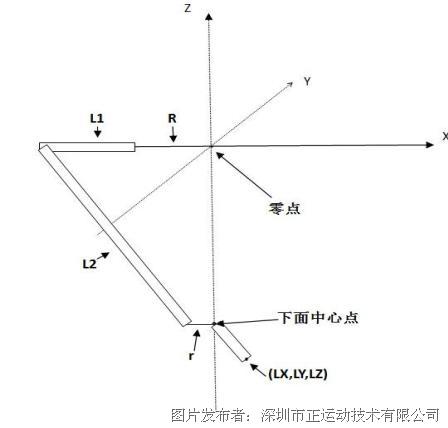
圖 3并聯機械手基本參數
R:大臂旋轉中心到基座中心的距離。
L1:大臂長度,兩端旋轉中心距離。
L2:小臂長度,兩端旋轉中心距離。
r:小臂末端連接中心到底座中心的距離。
LX:末端工作點相對于底座中心的X偏移,(負向為負數)
LY: 末端工作點相對于底座中心的Y偏移,(負向為負數)
LZ: 末端工作點相對于底座中心的Z偏移,(負向為負數)
1.3主要應用
并聯機械手目前主要應用在零件檢測和物料分揀上,其結構特點使得運行時速度可以更快,提高生產效率。根據傳感器和控制程序的設置可以實現不同的功能,比如現在出現的三軸并聯機械手結構的3d打印機。
三、EtherCAT簡介
EtherCAT(以太網控制自動化技術)是一個以以太網為基礎的開放架構的現場總線系統,EtherCAT名稱中的CAT為Control Automation Technology(控制自動化技術)首字母的縮寫。開始由德國倍福自動化有限公司(Beckhoff Automation GmbH) 研發。
EtherCAT在網絡性能上達到了一個新的高度。1000個分布式I/O數據的刷新周期僅為30μs,其中包括端子循環時間。通過一個以太網幀,可以交換高達1486字節的過程數據,幾乎相當于12000個數字量I/O。而這一數據量的傳輸僅用300μs。
與100個伺服軸的通訊只需100μs。在此期間,可以向所有軸提供設置值和控制數據,并報告它們的實際位置和狀態。分布式時鐘技術保證了這些軸之間的同步時間偏差小于1微秒。
利用 EtherCAT 技術的優異性能,可以實現用傳統現場總線系統所無法實現的控制方法。這樣,通過總線也可以形成超高速控制回路。以前需要本地專用硬件支持的功能現在可在軟件中加以映射。巨大的帶寬資源使狀態數據與任何數據可并行傳輸。EtherCAT技術使得通訊技術與現代高性能的工業PC相匹配。總線系統不再是控制理念的瓶頸。分布式I/O的數據傳遞超過了只能由本地I/O接口才能實現的性能。
四、正運動EtherCAT總線控制器
正運動技術有限公司致力于做更好的運動控制器,非總線的ZMC運動控制器采用華為 IPD-CMM 軟件開發流程開發,使得產品具備電信級的穩定性;結合了新的控制理論及網絡控制技術; 以太網,RS232,RS485, USB,CAN 等多種接口;單控制器最多可以控制多達 32 個軸。同時結合了傳統PLC和運動控制卡,即可進行邏輯控制,又可進行運動控制,精簡了工業現場的控制設備。
而在發現了市場上對于EtherCAT總線控制器的需求后,正運動技術有限公司更進一步,潛心開發出了EtherCAT總線運動控制器、總線IO擴展和總線軸擴展等一系列產品。本次就采用ZMC464總線控制器對3軸并聯機械手進行控制,外觀如下圖。
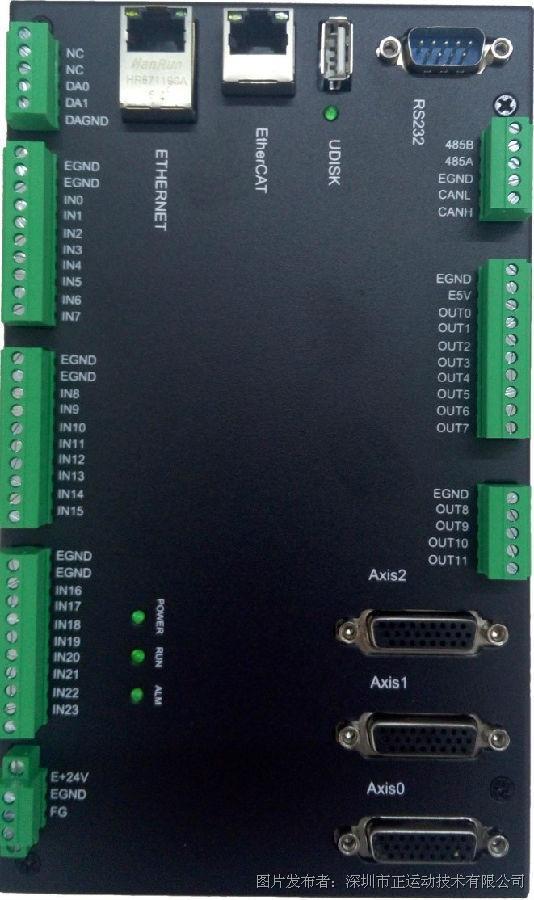
圖 4 ZMC464總線控制器
ZMC464在非總線運動控制器的基礎上,優化了以下幾點。
最多達 64 軸運動控制(3 脈沖軸+64ECAT 軸);
支持最多達 16 軸同時直線插補、 任意空間圓弧插補、 螺旋插補 ;
支持多機臺同時聯動;
ECAT 最快 100us 的刷新周期;
每軸最大輸出脈沖頻率 8MHz;
EtherCAT總線控制器的出現,使得運動控制的響應速度更快,精度更高。現場接線更加簡潔、簡單,驅動器不再需要一一與控制器上的軸接口一一對應,只需要用網線串接驅動器即可,現場控制電箱體積更小。
五、正運動控制方案
本方案使用的3軸并聯機械手如下圖5,基本參數如圖6。

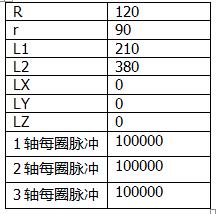
圖 5使用的三軸并聯機械手 圖6機械手基本參數
對于并聯機械手的控制而言,關鍵的是如何將關節軸坐標系轉換為笛卡爾坐標系,操作末端執行器在笛卡爾坐標系中運動,關節軸要能夠自動解算出響應的關節軸坐標,這個過程就是逆解,需要編寫相應的算法。
為了更方便的使用,正運動已經將不同的機械結構算法進行了封裝,使用的時候只需要設置好然機械結構的參數,然后使用CONNframe指令調用3軸并聯機械手結構即可。建立連接后,我們就可以通過操作3個虛擬軸使末端執行器移動到笛卡爾坐標系中的指定位置,此時3個關節軸會自動解算需要旋轉的角度。
本方案主要實現直線運動和圓弧運動。
1.控制器接線
使用網線通過EtheaCAT接口將ZMC464與伺服驅動器連接,驅動器要支持EtherCAT總線驅動,這里使用的是邁信EP3驅動器。連接好第一個驅動器后,用網線依次串接剩余驅動器即可,如下圖。

圖 7 ZMC464總線控制器接線
2.控制器設置
ZMC總線控制器通過axis_address指令可以設置驅動器綁定的軸號。通過atype()指令可以設置軸的控制類型。本方案采用atype=65位置閉環模式控制機械手。
可以通過DRIVER類型指令直接對驅動器設置,比如drive_mode可以設置驅動器的控制模式(對應驅動器數據字典)。DRIVE_CONTROLWORD設置驅動功能。
也可以通過SDO_READ和SDO_WRITE直接對驅動器進行讀寫。
3.控制程序
過程控制的程序可以通過Zdevelop編寫,使用了Zbasic編程環境。根據需要的功能,可以自定義編寫相應功能的SUB,使程序結構更清晰易讀。本方案包含的功能主要有機械手結構正解逆解的切換、相對絕對模式的切換、G代碼操作、手動操作等。
運動時的實時參數也可通過zdevelop的軸參數查看。
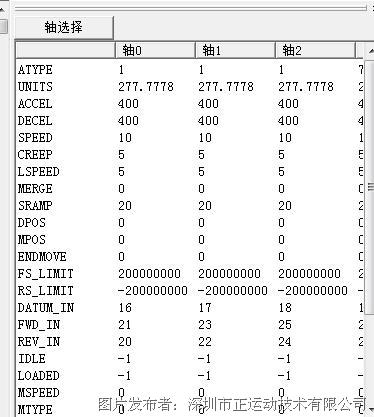
圖 8軸參數列表
3.HMI人機界面
正運動開發了自己的HMI人機界面和手持盒,并加入到ZDevelop編程軟件中,與basic聯合編程,使得在basic編程的同時也可以進行HMI界面設計,程序將一同下載到控制器。通過網線連接控制器與手持盒,會自動顯示出hmi界面。
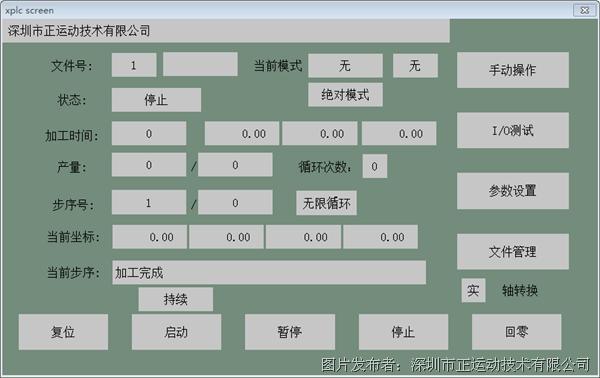
圖 9 HMI界面
4.機械手運動方式
程序中建立了與標準G代碼功能相同的自定義G代碼,如下圖。

圖 10 G代碼
操作者可以直接使用G代碼來編寫運動程序,控制3軸機械手的運動軌跡,實現了脫離PC端編程。本方案中主要使用了G01直線運動和G02順圓指令,在笛卡爾坐標系中運動軌跡為,原點位置(0,0,-294)->(0,0,-450)->(180,0,-450)->(180,0,-450)->順時針畫整圓->回原點(0,0,-294)。
5.控制器報警
總線控制器連接好驅動器后,要通過寫指令使驅動器使能并綁定軸號,如果編寫軸指令數量與連接的驅動器數量不一致時,驅動器不會使能,預防因漏接多接可能引起的事故。同時,在運行過程中,如果斷開某一驅動器,運動會立即停止并報警;如果連接新的驅動器,不會對新連接的驅動器操作,直到斷電重啟并修改程序。
可以在命令行輸入?*ethercat,來查看驅動器狀態。

圖 11 驅動器狀態
六、結論
通過一段時間的測試,使機械手在不同的速度下運行時都能保持平穩準確。綜上所述,ZMC總線控制器通過basic編寫過程程序,通過HMI組態環境編寫人機界面,二者結合,更加方便了多軸運動控制的實現,而且總線控制器響應速度快,接線簡單方便,在多軸聯動控制方面更具優勢。
七、附錄:運動軌跡截圖
原點位置

直線軌跡


整圓軌跡








作者簡介
謝江文(1994-) 男 現就職于深圳正運動技術有限公司 技術工程師
地址 深圳市寶安區西鄉鐘屋1路70號大廣發綜合樓5樓
下一篇: PLC、DCS、FCS三大控
上一篇: MATLAB和Simulink在航


