發布日期:2022-10-25 點擊率:37
引言
高壓斷路器的分合閘速度是影響斷路器開斷性能的重要因素之一,分合閘速度過快,會使斷路器操作機構及各傳動部件承受超過極限的機械力,造成緩沖器損壞,縮短斷路器使用壽命:分閘速度過慢,無法快速切斷正常運行電流或故障電流,會使觸頭間燃弧時間延長,出現觸頭燒損甚至滅弧室爆炸等危害:合閘速度過慢,到斷路器合閘于短路故障時,可能無法克服觸頭關合電動力的作用,從而引發觸頭振動或運動停滯,繼而造成觸頭燒損或滅弧室爆炸[1-2]。此外,斷路器運行時間超過6年后,分合閘彈簧疲軟也會導致高壓斷路器速度特性發生變化。
現有測速傳感器均為接觸式傳感器,主要包括直線電阻傳感器、旋轉電阻傳感器、旋轉光柵傳感器、加速度傳感器等[3-7]。這類接觸式傳感器的安裝條件較為苛刻,極易出現測速不準或無速度曲線等問題。因此,本文設計了一種快拆卸、無接觸、效果穩定的激光傳感器解決該問題。
1高壓斷路器激光測速傳感器原理
如圖1所示,高壓斷路器激光測速傳感器采用的是激光三角漫反射原理。由激光器發出的測量光,經透鏡準直后形成一束較細的測量光,投射到被測物體表面6位置,并向各個方向產生漫反射光,一部分漫反射光經接收透鏡后在CCD陣列元件上聚焦成像。當被測量表面在豎直方向上發生位移變化至6'時,像點也會隨之在CCD陣列元件上發生移動。信號處理單元根據激光發射點、測量點以及光斑在光敏元件上的位置點三者構成的三角關系計算得到被測物體移動的相對距離,再結合運動消耗的時間,即可得到被測物體的平均運動速度。
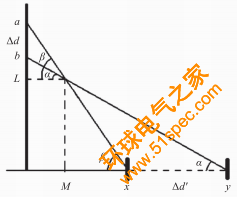
圖1激光傳感器原理圖
將激光傳感器的工作原理轉化為如圖2所示的等效幾何示意圖,通過簡單計算,即可得到從x點移動到y點的距離。
圖2等效幾何示意圖
圖2中水平距離量x、y及角度a、8均為未知量,垂直距離量a、b、L及皿均為已知量,由于測試儀器內部采樣直角三角形設計,故不難得到x、y及水平位移距離Ad'的數學表達式:

2激光測速傳感器軟硬件設計
結合激光傳感器測距原理,本文采用現場可編程門陣列(FPGA)芯片作為激光位移傳感器的主控模塊,分別實現光電檢測元件的驅動、數據采集芯片的控制、數據處理、激光器控制和LED顯示等功能。
2.1激光器選型
對于激光器的選用,需考慮CCD的靈敏度,即CCD對單位光照積累信號的能力,由CCD與光譜對應的曲線關系可以分析得出,只要保證激光器的波長在600~800nm,就可使CCD光譜響應度保持在較高的數值上。故采用紅色半導體激光器,波長650nm、輸出功率0~10mw相對比較合適。
2.2CCD接收模塊設計
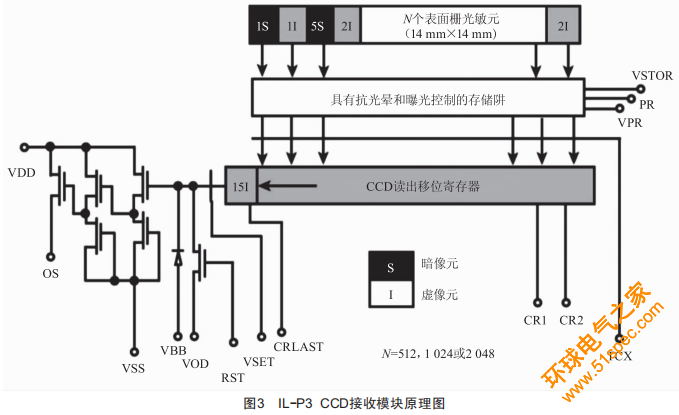
CCD傳感器用于接收表面輻射的光信號并轉換為相應的電信號,從而換算出最強光壓點在CCD陣列中的移動距離。本文采用1L-P3CCD接收模塊,其具有體積小、功耗小、效率高、工作電壓低等優點,如圖3所示。
2.3驅動電路設計
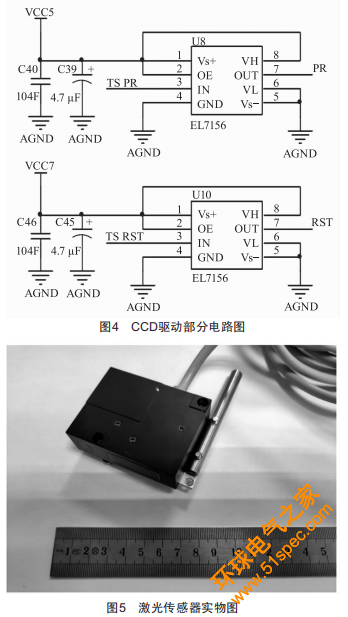
CCD驅動電路選用EL7156高性能三態驅動芯片,信號輸出最高頻率40MHz,CCD輸出信號最高頻率亦是40MHz,可以滿足CCD對信號驅動的要求。對于驅動高容性負載,其具有3.5A的峰值驅動能力,而CCD驅動的電流最高值為1A,其驅動能力完全滿足要求。CCD驅動部分電路圖如圖4所示。
3現場實測
激光傳感器在設計封裝完成及性能檢測合格后,在變電站現場進行了實測,如圖5所示。
由于110kV高壓斷路器為三相聯動的傳動形式,一套激光傳感器即可完成三相速度的測試,故現場分別選取了兩種不同廠家及型號的斷路器。測試采用通用測速儀配合激光傳感器的組合,在水平移動的三相傳動連桿頂端進行多次重復測試,結果如表1所示。
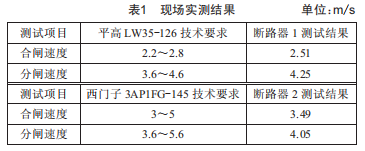
將測試結果與傳統旋轉傳感器進行了對比,充分驗證了高壓斷路器激光測速傳感器的準確性,同時在多次反復測試中,試驗數據保持穩定,實現了預期的非接觸、適應性好、穩定性高的設計初衷。
4結語
本文設計了一款高壓開關剛分/剛合測速激光傳感器,可以滿足電網試驗規程中對斷路器測速的要求,在一定程度上克服了高壓斷路器智能化發展的測速瓶頸,并解決了當前高壓斷路器分合閘速度測試中存在的難題。該激光測速傳感器簡單實用,能很好地解決傳統高壓斷路器測速傳感器安裝困難的問題,使得機械特性試驗更加簡單。與此同時,試驗人員可以節省大量操作學習的時間,降低誤操作、誤設置的概率。經過現場實測驗證,該激光傳感器針對110kV高壓斷路器具有良好的測試準確性和重復性。
下一篇: PLC、DCS、FCS三大控
上一篇: 某新型城際動車組牽引


