發布日期:2022-04-22 點擊率:324
通過改變µA741的正向與反向輸入電壓的不同使µA741的輸出端輸出穩定的高電平或低電平從而使8050晶體三極管導通或截止來控制繼電器的錫合與斷開。
如圖3.1與圖3.2中由電阻R1和滑動變阻器R2共同分得VCC的5V電壓,電阻R4和滑動變阻器R3共同分得VCC的5V電壓。µA741的正向輸入電壓取自滑動變阻器R3,反向輸入電壓取自電阻R1。通過調節滑動變阻器R3能改變此光控開關的靈敏度。從µA741的輸出端接一個保護電阻R5再接入到8050晶體三極管的基極。8050晶體三極管的發射極接地,集電極通過整流二極管1N4007與電源VCC相連構成通路。5V固態繼電器的一端與8050晶體三極管的集電極和VCC相連,另一端與LED燈相連。
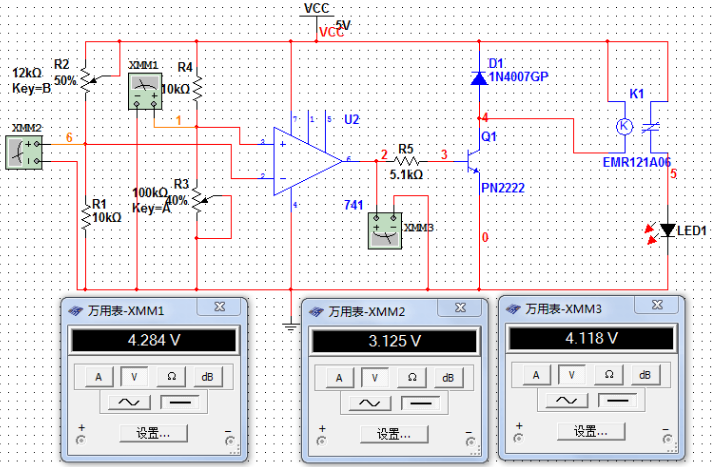
圖3.1無光照是LED燈變亮
當無光照時,由于光敏二極管反向接在電路中,因為光敏二極管具有單向導電性,無光照時光敏二極管處于截止狀態,用滑動變阻器代替光敏二極管時,即通過調節滑動變阻器使電阻變大,使滑動變阻器分得的VCC的電壓變多,從而使得R1上分得的電壓變少,既而使得µA741反向輸入端的電壓變小。當反向輸入端的電壓變的小于正向輸入端的電壓時,如圖1中µA741正向輸入端電壓為4.284V,反向輸入端電壓為3.125V時,µA741電壓比較器的輸出為高電平4.118V。(只要µA741的反向輸入端電壓小于正向輸入端的電壓,電壓比較器的輸出恒為高電平4.118V。)由于µA741的輸出為高電平4.118V足以是8050晶體三極管導通。從而使5V固態繼電器錫合相當于開關閉合而使LED燈導通發光。
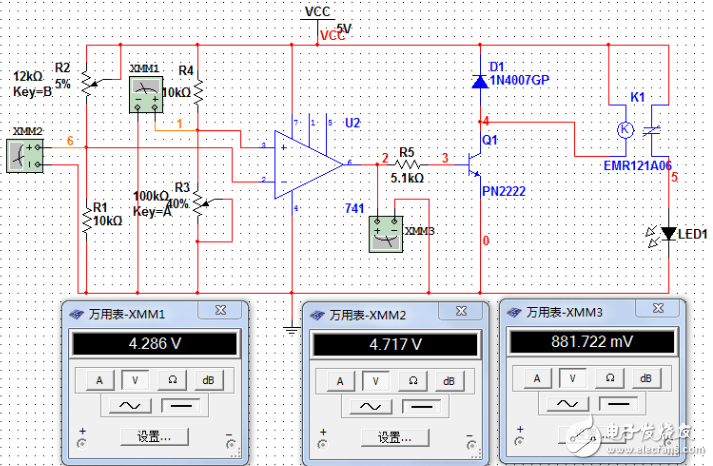
圖3.2有光照時LED燈變滅
當有光照時,光敏二極管由于受到光照產生光電流,用滑動變阻器反映出來即是滑動變阻器R2的阻值變小。即可通過滑動滑動變阻器的滑片使其阻值變小,便能模擬出光敏二極管受光照時的變化。當滑動變阻器R2電阻變小時,R2上分得的電壓變小,即固體電阻R1上分得的電壓變大,即µA741的反向輸入端的電壓變大。當µA741反向輸入端的電壓比正向輸入端的電壓大,即上圖2中µA741的正向輸入電壓4.286V,反向輸入電壓4.717V時,µA741的輸出變為低電平881.772mV。(只要µA741的反向輸入電壓大于正向輸入電壓,其輸出恒為低電平881.772mV)由于從µA741輸出的低電平不足以使8050晶體三極管導通。因此不能使得5V固態繼電器錫合,相當于開關斷開而不能使LED燈導通,所以LED燈變滅。
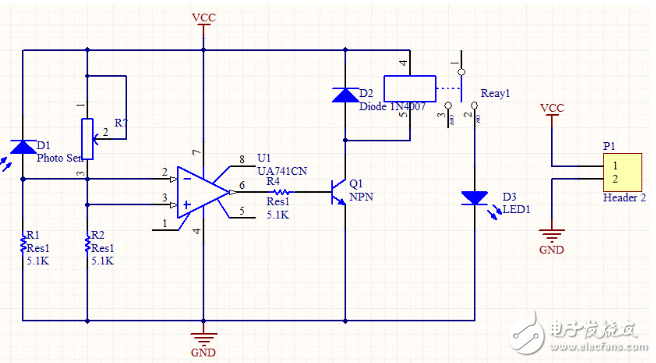
圖3.3PCB板的原理圖
光控開關電路如下圖,主要特點是白天有光照,燈泡不亮,夜晚黯淡無光,電路自動通電,燈泡亮起。
白天在較強光照下,光導管227A(一種光敏電阻)兩端阻值很小,約20~50kΩ,晶體管VT2獲得基極電流而導通,VT1從R2上得到正偏電壓也導通,繼電器線圈KA得電,繼電器的常閉觸電②、③斷開,兩只晶閘管V1和V2沒有觸發信號而不導通,因而燈泡EL不亮。
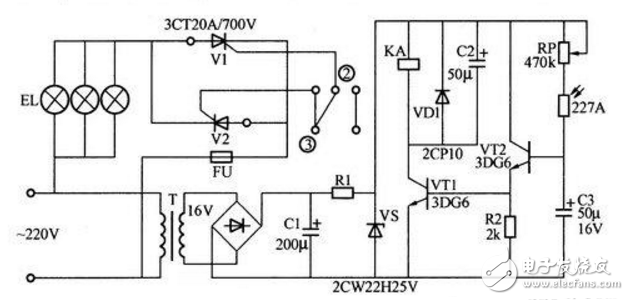
夜幕降臨時,隨著光照強度下降,光導管227A的阻值不斷增加,最終可達1MΩ左右,VT1因基極電流太小而截止,VT1也相應截止,繼電器KA失電釋放,常閉觸電②、③閉合,晶閘管V1、V2因其兩控制相連而處于雙向導通狀態,電源被接通,照明燈亮。
圖中,電容器C3用于防止夜間瞬時強光干擾引起照明燈熄滅。而當光亮強度在臨界點附件緩慢變化時,易引起繼電器顫動而使燈光閃動,C2可以過濾掉脈沖電流,避免照明燈閃亮。
5V電源,5V繼電器,三極管,光敏電阻,滑變做個光控開關控制繼電器工作電路。
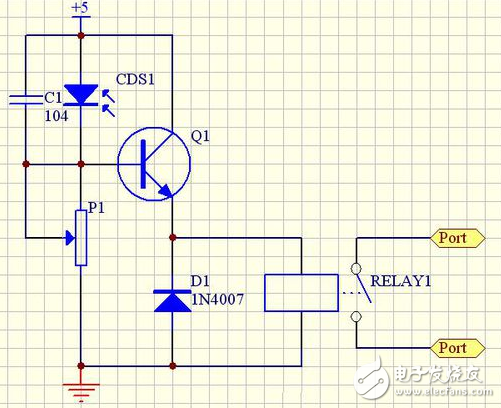
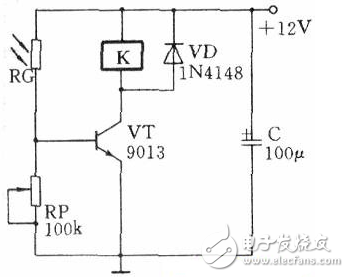
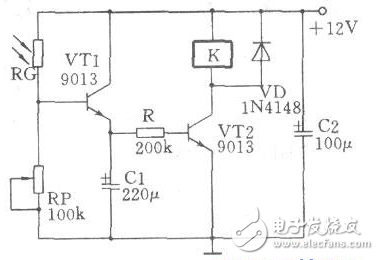
上圖是一個簡單的亮通開關。RP為光控閾值調節電位器,通過它可調節光控靈敏度(下面幾個電路均相同)。白天光線較強,光敏電阻器RG呈低阻值,三極管VT導通,繼電器K吸合,其常開觸點閉合,接通被控電器工作。夜間,光線較暗,RG呈高電阻,VT截止,K釋放,被控電器停止作。
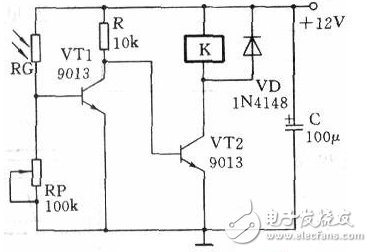
上圖為典型的暗通開關,它利用VT2反相原理將原來的亮通改為暗通。白天RG呈低電阻,VT1導通,其集電極輸出低電平,故VT2截止,K不動作。當夜間光線較暗時,RG呈高電阻,VT1截止,其集電極輸出高電平,VT2導通,K吸合動作,從而實現暗通的操作。
上述兩電路,如果將光敏電阻器RG與電位器RP位置互換,則亮通就變為暗通,暗通則變為亮通。上圖是一個實用的光控延遲開關,工作條件是:需要為RG外面制作一個遮光筒,這樣平時無論外面光線強弱如何,只要無直射光線射入遮光筒,RG均無強光照射而呈高電阻。圖3—圖5電路均有此要求。電路工作過程是:平時RG為高電阻,VT1截止,VT2也同樣截止,K不動作。當用手電筒或激光筆對準遮光筒里的RG照射一下,RG立刻呈低電阻,VT1導通,因VT1導通時其等效電阻很小,C1很快充滿電荷,VT2也導通,K吸合,被控電器工作。停止光照后,VT1雖恢復截止,但Cl所儲存的電荷可通過R向VT2發射結放電,仍能維持VT2保持導通態。Cl電荷隨放電逐漸減少,當不足以維持VT2導通時,VT2即截止,K釋放,被控電器停止工作。電路延遲時間主要由R與C】放電時間常數決定,但VT2的B值對延遲時間影響很大,若B值較小,就限制了R的取值,故要求p值在200以上,VT2最好能采用達林頓復合管。
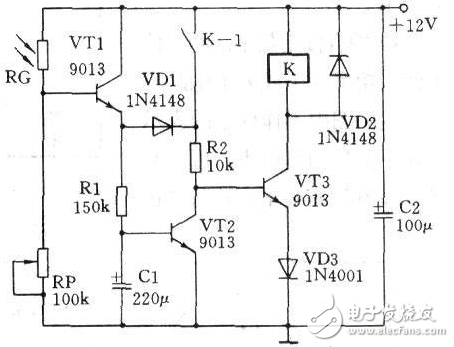
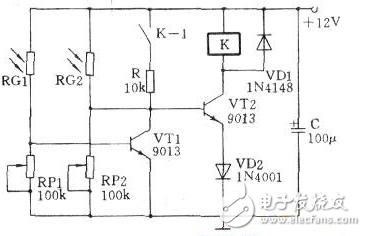
上圖為雙敏感器光控開關,RG1為“關”敏感器,RG2為“開”敏感器。電路工作過程為:用電簡或激光筆照一下RG2,VT2立刻導通,K吸合,其常開觸點之一K-l閉合對電路自鎖,另一個常開觸點可使被控電器通電工作。需要關機時,只要再照射一下RG1,使VT1迅速導通,VT1的導通就將VT2的基極電位下拉迫使VT2截止,K釋放,被控電器停止工作。VD2的作用是抬高VT2在導通時的基極電位,有利于照射RG1的關機操作。VD2如改用發光二極管,還能起到開關機狀態指示。
上圖是單敏感器光控開關,用激光筆或電筒照射時能實現點按一下“開機”,長按一下“關機”的操作。工作過程是:對RG短暫照射一下,VT1導通,電流一路經VT1、VD1、R2注入VT3基極,使VT3迅速導通,K動作吸合,其一個常開觸點K-l閉合對電路自鎖,另一個常開觸點可使被控電器通電,實現“開機”操作。電流另一路經VT1、Rl向Cl充電,使Cl兩端電位上升,但由于RG受光照射時間很短,Cl兩端電位不可能上升到VT2的開門電平,故對電路無影響。需要關機時,只要照射RG的時間稍長些,使C1兩端電位升至0.65V左右,VT2即導通,使VT.3的基極電位下拉,迫使VT3截止,K釋放,所有常開觸點跳開,從而實現“關機”操作。VD3的作用與圖4中的VD2相同,也可用發光二極管代替。
隨著電子技術的發展,出現了多種PWM技術,其中包括:相電壓控制PWM、脈寬PWM法、隨機PWM、SPWM法、線電壓控制PWM等,而在鎳氫電池智能充電器中采用的脈寬PWM法,它是把每一脈沖寬度均相等的脈沖列作為PWM波形,通過改變脈沖列的周期可以調頻,改變脈沖的寬度或占空比可以調壓,采用適當控制方法即可使電壓與頻率協調變化。可以通過調整PWM的周期、PWM的占空比而達到控制充電電流的目的。
模擬信號的值可以連續變化,其時間和幅度的分辨率都沒有限制。9V電池就是一種模擬器件,因為它的輸出電壓并不精確地等于9V,而是隨時間發生變化,并可取任何實數值。與此類似,從電池吸收的電流也不限定在一組可能的取值范圍之內。模擬信號與數字信號的區別在于后者的取值通常只能屬于預先確定的可能取值集合之內,例如在{0V,5V}這一集合中取值。
模擬電壓和電流可直接用來進行控制,如對汽車收音機的音量進行控制。在簡單的模擬收音機中,音量旋鈕被連接到一個可變電阻。擰動旋鈕時,電阻值變大或變小;流經這個電阻的電流也隨之增加或減少,從而改變了驅動揚聲器的電流值,使音量相應變大或變小。與收音機一樣,模擬電路的輸出與輸入成線性比例。
盡管模擬控制看起來可能直觀而簡單,但它并不總是非常經濟或可行的。其中一點就是,模擬電路容易隨時間漂移,因而難以調節。能夠解決這個問題的精密模擬電路可能非常龐大、笨重(如老式的家庭立體聲設備)和昂貴。模擬電路還有可能嚴重發熱,其功耗相對于工作元件兩端電壓與電流的乘積成正比。模擬電路還可能對噪聲很敏感,任何擾動或噪聲都肯定會改變電流值的大小。
通過以數字方式控制模擬電路,可以大幅度降低系統的成本和功耗。此外,許多微控制器和DSP已經在芯片上包含了PWM控制器,這使數字控制的實現變得更加容易了。
脈寬調制(PWM)基本原理:控制方式就是對逆變電路開關器件的通斷進行控制,使輸出端得到一系列幅值相等的脈沖,用這些脈沖來代替正弦波或所需要的波形。也就是在輸出波形的半個周期中產生多個脈沖,使各脈沖的等值電壓為正弦波形,所獲得的輸出平滑且低次諧波少。按一定的規則對各脈沖的寬度進行調制,即可改變逆變電路輸出電壓的大小,也可改變輸出頻率。
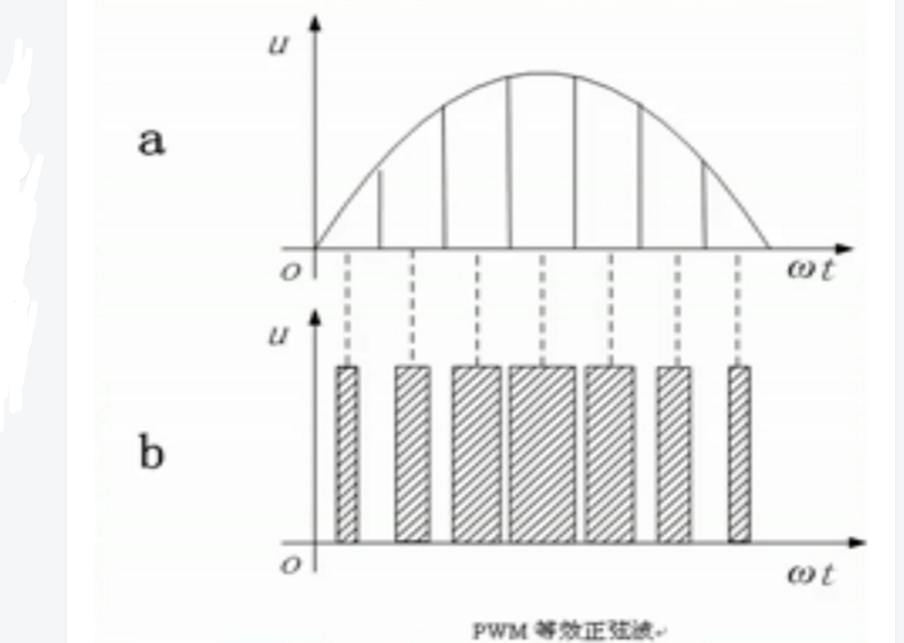
例如,把正弦半波波形分成N等份,就可把正弦半波看成由N個彼此相連的脈沖所組成的波形。這些脈沖寬度相等,都等于 π/n ,但幅值不等,且脈沖頂部不是水平直線,而是曲線,各脈沖的幅值按正弦規律變化。如果把上述脈沖序列用同樣數量的等幅而不等寬的矩形脈沖序列代替,使矩形脈沖的中點和相應正弦等分的中點重合,且使矩形脈沖和相應正弦部分面積(即沖量)相等,就得到一組脈沖序列,這就是PWM波形。可以看出,各脈沖寬度是按正弦規律變化的。根據沖量相等效果相同的原理,PWM波形和正弦半波是等效的。對于正弦的負半周,也可以用同樣的方法得到PWM波形。
在PWM波形中,各脈沖的幅值是相等的,要改變等效輸出正弦波的幅值時,只要按同一比例系數改變各脈沖的寬度即可,因此在交-直-交變頻器中,PWM逆變電路輸出的脈沖電壓就是直流側電壓的幅值。
根據上述原理,在給出了正弦波頻率,幅值和半個周期內的脈沖數后,PWM波形各脈沖的寬度和間隔就可以準確計算出來。按照計算結果控制電路中各開關器件的通斷,就可以得到所需要的PWM波形。
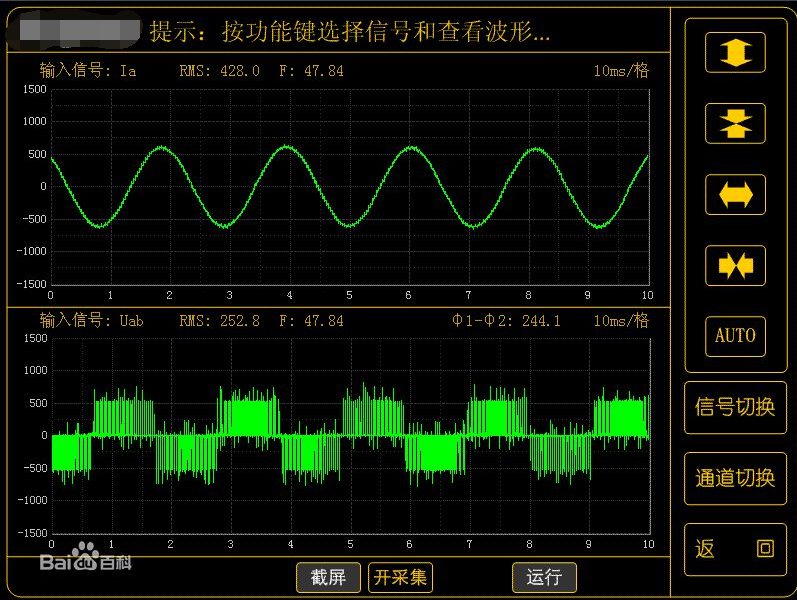
下圖為變頻器輸出的PWM波的實時波形。
特點:
簡單靈活 動態響應好
應用:
電動機控制(比如機器人內的電機控制,STM32中一個芯片可以控制很多電機)、功率控制、
轉換原理:
將模擬的信號(連續的曲線)分割,計算每塊地面積,轉換成數字信號的面積(不同的面積有不同的寬度,這也就是寬度調制這個名字的由來)
STM32除了TIM6,7(基本定時器),TIM1,8可以產生7路,共14路;通用定時器TIM2,3,4,5每個4路,共16路,所以STM32可以產生30路PWM輸出。
控制原理
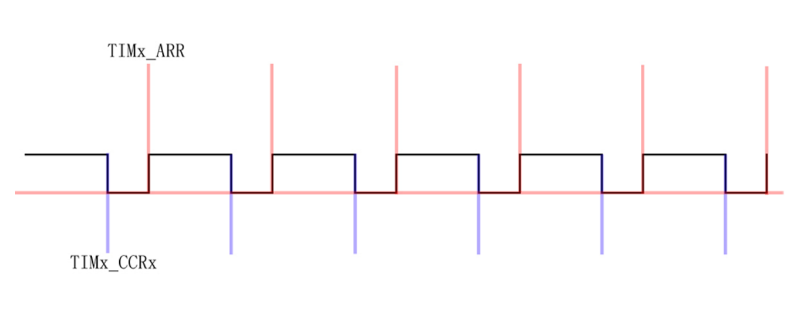
占空比:高電平持續時間占總時間的比例。
STM32 的PWM是TIMx_ARR寄存器確定頻率(周期)、由TIMx_CCRx寄存器確定占空比的信號
脈沖寬度調制模式可以產生一個由 TIM1_ARR 寄存器確定頻率、由TIM1_CCRx寄存器確定占空比的信號。在 TIM1_CCMRx寄存器中的OCxM位寫入“110”(PWM 模式 1)或“111”(PWM 模式 2),【模式1,2選擇輸出的高低電平】能夠獨立地設置每個通道工作在 PWM模式,每個 OCx 輸出一路 PWM。必須通過設置 TIM1_CCMRx 寄存器 OCxPE 位使能相應的預裝載寄存器,最后還要設置 TIM1_CR1 寄存器的 ARPE 位使能自動重裝載的預裝載寄存器(在向上計數或中心對稱模式中)。
向上計數配置
當 TIM1_CR1 寄存器中的 DIR 位為低的時候執行向上計數。
在 PWM 模式 1,當 TIM1_CNT【計數器值】《 TIM1_CCRx 時 PWM 參考信號,OCxREF 為高,否則為低。如果 TIM1_CCRx中的比較值大于自動重裝載值(TIM1_ARR),則 OCxREF 保持為“1"。如果比較值為 0,則 OCxREF 保持為“0"。 圖 128 為 TIM1_ARR=8 時邊沿對齊的 PWM 波形實例
【不同的模式,1和0代表的電平高低不同,不是1是高,0是低】
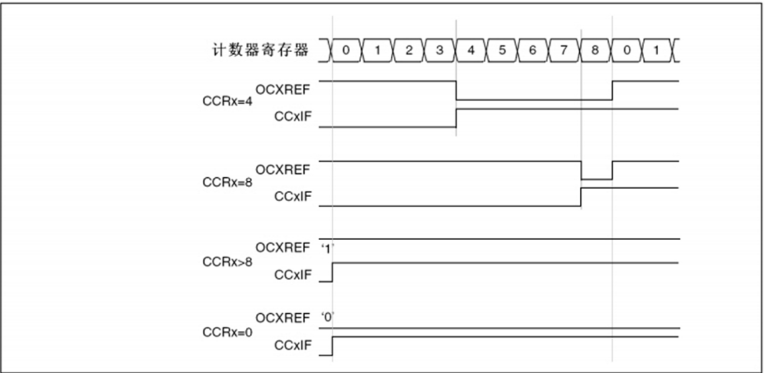
第一行是采用模式1的,模式2與模式1原理相同不過1和0代表的高低電平相反
還有向下計數模式(與向上技術模式相反),中央對齊模式,
最后,重點是要通過兩個寄存器TIMx_ARR寄存器,TIMx_CCRx寄存器控制
下一篇: PLC、DCS、FCS三大控
上一篇: pwm雙極性調制電路圖_


