發布日期:2022-05-20 點擊率:41
近年來,我國煤炭需求量逐年加大,加之多年來對安全投入的虧欠,導致礦難事故時有發生,給人民生命財產造成了嚴重的損失。 礦難事故以瓦斯爆炸事故危害最為嚴重。 事故發生時,救援專家由于缺少必要的現場環境信息,無法及時做出有針對性的搶險預案; 救援人員往往需要經過很長時間的強制通風,排盡毒氣后才能進入事故現場進行偵查和救援,從而延誤了寶貴的第一救援時間。 因此,有必要研制一種實用可靠的搜救機器人,使之能夠替代救援人員在第一時間進入井下執行搜索任務,并將搜索所得信息反饋給救援人員。 該研究對提高煤礦事故應急搶險能力、減少人員傷亡、救援決策具有重要意義,也為機器人技術的研究、應用和推廣開辟了一個嶄新的領域。
1 搜索探測多機器人系統工作原理
為解決礦井事故中井下復雜環境信息監測、人員搜索定位、遠程通信等問題,本文建立了一種基于無線傳感器網絡的搜索探測多機器人系統。 該系統采用功能強大的母機器人和數個子機器人組成子母式體系結構,以母機器人為越障和探測主體,小型子機器人作為沿途的通訊、監測節點。 機器人系統要有效穿越障礙,到達危險和災害現場,采集(氣、火、水) 信息并將信息傳遞給井外的救援人員,因此需要重點考慮機器人系統的越障能力、通信能力和傳感能力。
該多機器人系統的井下搜索探測主要針對4種地形環境: 普通的粗糙地面; 相對機器人車體較高的障礙; 上下甚至左右都有障礙,只有1個狹小的開放空間; 相對機器人車體較長的裂縫。 前2種障礙類型要求機器人具有很強的地形附著能力,履帶式機器人會比輪式機器人更有效; 而通常單個履帶移動機器人較大的體積(橫截面) 又限制了它進入狹窄空間和跨越較大裂縫。 因此,需要構建1個由多種履帶構型多關節體鉸接而成的母機器人,該構型增強了機器人翻越、穿越障礙的能力,同時提高了整個系統進入巷道的快速性; 同時子機器人采用2輪獨立驅動外加彈跳足方式,以減小體積便于部署且具有一定的局部越障運動能力,用以構建傳感器網絡并調整整個網絡的性能。
整個機器人系統解決了穿越障礙進入巷道深處的難題。 同時,母機器人自身攜帶并按需配置子機器人作為無線通訊節點,構建多跳通訊網絡,為井下通訊搭建了健壯的平臺。 子母機器人間通過中繼節點無線通訊,不但進一步擴展了探測距離,而且能通過節點機器人的傳感功能動態監控巷道環境變化。 機器人系統體系結構如圖1所示。

2 多機器人系統結構與越障功能
2.1.1 母機器人結構組成
母機器人是獨立完整的個體,具有行走、越障、探測和簡單的救護功能。 所開發的這種母機器人由多關節體鉸接而成,由5個單元組成,每個單元具有不同的功能,單元之間通過鉸鏈連接,可以適應非常復雜的地形條件,實現控制、傳感和通訊功能。 總體結構如圖2所示,每個單元都裝有自己的電機、減速器,驅動器用以獨立驅動自身的運動。 頭部單元和尾部單元末端裝有可折疊柔性臂,臂前端安有攝像頭,可柔性適應狹小通道。 控制傳感單元內含基于嵌入式主板的主控制器、各電機控制器、多種傳感器、無線射頻收發器等。 搭載單元具有可開閉艙門,裝有多個小機器人。 電源單元攜帶較大的鋰聚合物電池,為各模塊供電。

2.1.2 母機器人越障性能分析
煤礦爆炸會有大量的煤塊跌落,根據我國各地煤礦煤質分析,爆炸后碎片一般不超過300 mm,因此需要機器人能攀越由碎片構成的300 mm的障礙,并可跨越不寬于600 mm的壕溝,以適應煤礦破壞后各種物體構成的極限非結構化環境。
針對該越障要求開發的母機器人本體主要包括多層履帶機器人單元和連接鉸鏈。

(1) 多層履帶機器人單元。 機器人采用多層履帶式結構,利于產生摩擦驅動前進。 該機器人的5個單元共采用了3種履帶模塊: 頭部單元和尾部單元由單電機同步驅動雙層四履帶(圖3) ; 搭載單元采用雙電機獨立驅動左右兩側履帶,它帶有搭載艙,艙門放下可釋放出子機器人; 其他單元采用體模塊(圖3), 由雙電機左右獨立驅動雙層履帶和側履帶,即上下雙層四履帶,左右加裝側履帶,每側共4 條履帶由1個電機驅動,便于轉向推進。
單層履帶在推進過程中會將前上方障礙物卷向履帶下方造成進一步的阻礙,而雙層履帶則將障礙物卷向后方,以“挖掘”的方式推進,因此可以鉆過狹小空間。 在井下復雜彎曲巷道中前進時側履帶與巷道底面和側面的接觸有利于助推和轉向。 當機器人車體發生大的傾斜,下履帶不能很好地附著地面時,側履帶與巷道底面的接觸和相對運動可以起到助推的作用; 當有比較大的轉彎時,側履帶與巷道側面的接觸不但避免了車體卡死,還能以較大的驅動力輔助轉彎。
(2) 鉸鏈結構。 所采用的兩自由度主動鉸鏈可以實現對其前部單元的抬舉,從而翻越高達2個關節長度的障礙,或者跨越相對機器人車體較長的裂縫; 通過離合器控制鉸鏈還可以轉變為被動,讓機器人體根據不規則地形被動調整自身姿態,使履帶有效覆蓋地面,靈活適應地形。
2.1.3 輪跳復合子機器人結構組成及彈跳分析
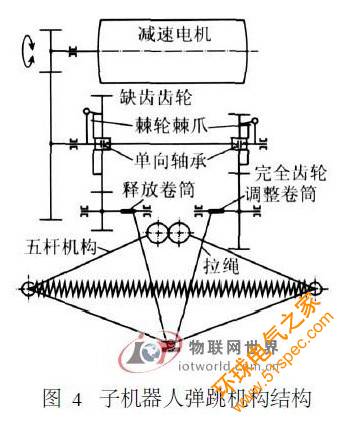
子機器人采用輪跳復合結構,主要由輪式運動組件和彈跳運動組件組成,其基本設計思想是: 平坦環境中機器人兩輪驅動運動到目標地址; 遇到障礙物或溝渠時,控制彈跳機構使機器人以適當姿態越過障礙。 機器人輪式運動組件由2個獨立驅動輪組成,彈跳運動組件的結構如圖4所示。
彈跳組件主要由減速電機、釋放機構、五桿彈跳機構、拉繩、調整機構5部分構成。 當減速電機正轉時,通過單向軸承和完全齒輪驅動調整卷筒,改變五桿機構拉繩的長度從而調整彈簧拉伸量進而調整五桿機構儲能; 當減速電機反轉時,通過單向軸承和缺齒齒輪驅動釋放卷筒,進行彈簧拉伸量微調和拉繩釋放,五桿彈跳機構與地面作用實現彈跳。 棘輪棘爪分別對釋放機構和調整機構起到任意位置鎖定的作用。 這種調整機構連續轉動的方式可以最大限度的調整彈簧儲能量,釋放機構任意位置釋放又可以方便地實現彈跳的控制。 機器人外形尺寸為<110 mm ×150 mm,總質量為1112 kg。 在彈跳實驗中,當五桿機構水平拉簧采用4根彈性系數為k = 112 N /mm的彈簧時,測得機器人彈跳高度為75 mm,能夠通過輪式運動結合自主彈跳避障,運動到預定位置。
3 多機器人系統控制與通訊
3.1.1 多機器人系統控制集成
母機器人以高可靠性嵌入式主板為主控計算機,完成運動部件驅動、通訊、傳感器信息采集、數據處理、圖像和聲音采集等功能。 傳感器采用數字輸出,經統一的RS232接口與計算機通訊。
子機器人功能組成包含運動模塊、傳感器模塊、無線射頻通信模塊、處理器模塊、能量供應模塊。 其中處理器模塊為整個系統的核心,采用基于ARM的嵌入式控制器,協調控制運動、傳感、通訊模塊的功能。
母機器人與子機器人、各子機器人之間的通訊通過母機器人和各子機器人搭建成的多跳通訊鏈路實現。 傳感器采集到的信息經過嵌入式系統融合壓縮,通過無線射頻模塊發送到通訊鏈路上并逐層傳遞到基站端。
3.1.2 多跳通訊網絡結構
無線傳感器網絡主要有2種結構: 集中式控制結構和分布式結構。 集中式結構需要功能強大且處于中心位置的主節點,很難在井下實現; 分布式結構需要很大的建鏈和維護開銷,容易出現泛洪等問題[ 5 ] 。經分析,煤礦主巷道結構狹長; 工作面巷道雖有大的平面空間,但通訊所面臨的障礙仍然是錯綜復雜的巷道壁面造成的阻擋。 因此,建立一種由多機器人組成的分布式鏈狀網絡結構可以很好地解決狹長巷道多跳通訊的問題。 同時,為了保障鏈狀結構的可靠性,在2個機器人有效通訊距離之間設置一個冗余機器人,解決節點惟一造成的壽命和可靠性問題,形成一種帶冗余節點的分布式鏈狀網絡結構。
這種網絡結構由基站、子機器人節點、子機器人冗余節點、母機器人節點組成。 在網絡的配置上,基站設置在人可達到的巷道最深處,以實現盡可能深地進入礦井,盡可能長地利用有纜方式與控制中心相連,保證能源和通訊的可靠性; 母機器人通過攜帶倉攜帶子機器人行走,當母機器人通過RSSI (接收信號強度指示法) 檢測到與基站或上級節點間無線信號衰減到指定閾值時,母機器人打開攜帶倉倉門,釋放一個子機器人,由子機器人做通訊中繼。 通過合理設置該閾值可以使正常節點通訊距離內存在冗余節點。 采用負載平衡機理和最小能量原則進行網絡的資源規劃和節能控制[ 6 ], 使冗余節點和工作節點交替工作,并根據能量情況適當移動,可以最大限度地保證網絡生存時間。 這種多個通訊節點多跳組網的方式有利于網絡的擴充,尤其適用于井下彎曲巷道中的通訊。 給每個通訊節點加裝傳感元件,還可以動態監控整個巷道的氣體、溫度變化情況。
3.1.3 通信協議
為提高吞吐量,并降低路由設計的復雜度,整個鏈狀網采用按節點ID次序順序擔當主節點的路由策略。
配置前首先通過程序固化的方式確定每個節點的ID號,母機器人按照ID順序依次配置完成后,機器人系統就構成了1個按ID次序排列的鏈狀結構網絡[ 7 ] 。 在網絡正常運行狀態下,各節點都處于監聽狀態,由主機器人每隔一段時間向逆序的下一個節點發起通信請求(控制幀)。 普通節點接收到的控制幀,如果信息中的目的ID和自身匹配時,此節點成為主節點,轉入接收模式,從前主節點接收信息(數據幀) ;當其接收完全部信息后,前主節點轉入監聽狀態,主節點開始尋找逆序的下一個節點作主節點。 如果目的ID的節點沒有響應,主節點自動將目的ID號減1尋找更小ID號的節點,更小ID號的節點接收到此請求后成為主節點。 節點在幾個通訊周期內如果監聽不到上級節點的任何信息,它將自動調整自身的位置向上級節點靠攏。 數據幀以這種逐節點多跳的方式傳遞到基站,整個通信過程結束。
另外,考慮到某些巷道信息監測的要求,有些時候需要允許普通節點成為主節點,主動發起通信,發送一些緊急信息。 例如情況緊急時,普通節點必須將報警信息(消息幀) 馬上發回基站,以便采取相應的措施。
如上所述,主節點和普通節點之間通信傳輸的信息幀有3 種格式: 控制幀、數據幀和消息幀[。 3種傳輸幀的格式如圖5 所示,其中,控制幀和消息幀由主節點發射,普通節點接收; 而數據幀由普通節點發射,主節點接收。 控制幀分為4段: 第1段使用4 bit的字節用來說明幀的類型; 第2段為信息發送的目的ID號; 第3段為控制信息; 第4段為校驗段。 數據幀分為5段: 第1段用來說明幀的類型; 第2段為信息發送的目的ID號;第3段為數據長度信息; 第4段為數據段,長度由數據長度中的參數決定; 第5段為校驗段。 消息幀也分為4段: 第1段說明幀的類型; 第2段為信息發送的目的ID號; 第3段為報警信息; 第4段為校驗段。
4 多機器人系統傳感器與接口模塊
4.1.1 高性能井下氣體及環境探測傳感器
井下搜索探測需要探明包括甲烷(CH4 ) 、一氧化碳(CO) 、氧氣(O2 ) 、溫度、濕度和風速在內的多項指標。 為減小體積、方便集成,選用MEMS工藝傳感器,并對傳感器進行集成和本安設計,使之具有體積小、集成度高、穩定性好、響應快等特點,適合井下探測需要。 本文對基于MEMS工藝的CH4,CO,O2 傳感器進行了統一的接口設計,便于作為模塊調用。
溫度感知選用數字式溫度傳感芯片LM75,它采用12位數字信號輸出,集成I2C串行接口,應用方便,無須外圍電路。 本文中母機器人采用收發獨立的超聲傳感器TCT4010F /S,通過對超聲波從發射至接收往返時間來判斷與周圍障礙物的距離,保證機器人具有良好的避障能力。 機器人采用雙軸加速度傳感器ADXL203和角速度傳感器ADXRS150來確定自身任一時刻的位姿。 雙軸加速度傳感器依靠重力加速度的分量計算俯仰角和翻滾角,角速度傳感器用來測量方位角。 測得的信號經A /D轉換送到傳感器模塊做進一步處理。
4.1.2 可靈活配置的傳感器接口模塊
多傳感器模塊是機器人感知自身信息和外部信息的重要組成部分。 當針對井下復雜應用環境時,多個攜帶不同傳感器的機器人組成機器人系統協調工作進行環境偵查,因此需要構建一個能靈活兼容多種傳感器件的硬件系統,根據用戶的要求配置所需的傳感器類型。

FPGA以軟件的方式實現硬件接口電路,便于同各類傳感器接口。 它通過將EPROM中用戶配置數據讀入片內編程RAM中,并以這些數據完成自身狀態的配置,硬件在連接上具有很強的靈活性。 當需要修改FPGA功能時,只需通過修改EPROM中的編程數據,就可以產生不同的電路功能。 本文傳感器處理電路選用Altera公司的Cyclonee系列FPGA器件。 硬件組成原理如圖6所示,Cyclone FPGA器件包括N IOS軟核CPU、鎖相環、CPU同外部設備的接口; EPCS1用來上電時對FPGA進行配置; EEPROM用來存儲傳感器標定參數; AD7888 用來采集傳感器信號,8路單端輸入,串行接口SPI; 目前選用的傳感器包括溫度傳感器、超聲傳感器、加速度傳感器和磁力計等。
其中,32位CPU即N IOS軟核處理器是一種用戶可按需配置和構建的32位/16位總線指令集和數據通道的嵌入式系統微處理器IP核。 這部分設計使用Altera 公司的SOPC Builder自動進行系統定義,完成SOPC開發的集成過程,在處理器中加入定時器實現AD定時采樣。 SP I模塊用來實現與串行AD的接口。N IOS處理器的特點之一即是Avalon總線,它是連接片上處理器和其他IP模塊的一種簡單的總線協議,規定了主部件和從部件之間進行連接的端口和通信時序。
與傳統總線結構中的中心仲裁器不同的是,Avalon總線的開關構造使用從設備仲裁技術,允許多個主設備控制器同步操作,由從設備仲裁器決定哪個主設備獲得訪問權。 這種開關結構優化了數據流,提高了傳感系統的吞吐量。
5 結論
(1) 構建了合理的子母式多機器人系統體系結構,設計了越障能力強、并具有較高機動性和地形適應性的母機器人和子機器人移動載體,以適應煤礦爆炸后的極度非結構環境。
(2) 基于無線傳感器網絡技術,采用多機器人構成分布式鏈狀網絡,在巖壁散射、遮擋物多的情況下實現井下巷道中較遠距離、穩定的多跳網絡通訊。
(3) 建立了一種基于FPGA軟核的多傳感器接口模塊,可以方便地集成各種環境探測傳感器、機器人狀態傳感器。
目前我國煤礦事故處于高發期,對井下事故探測、救護機器人提出了迫切需求。 因此,研制實用的煤礦井下搜索探測機器人,并對前沿技術進行探索研究具有重要的社會意義和學術價值,未來的產業化前景也十分廣泛,不僅可以用于煤礦事故,也可以應用于地震、火災等其他自然災害和人為事故。
1
下一篇: PLC、DCS、FCS三大控
上一篇: 基于物聯網的無人值守


