本文來自與非網
前幾日聽聞一個“不幸”的消息,8 月 1 日起江蘇聯網高速公路全路網啟用區間測速! 對于我這種常年散養的外放一族來講又得小心了。
那么測速到底是怎么實現的?今天我們就來巴拉巴拉。
測速點除了常見的“爆閃燈”之外,旁邊還有一個微波雷達。
雷達產生的是連續波信號不間斷的覆蓋掃描區域。凡是通過檢測線的車輛,其反射波也被檢測到,于是就立即計算出車輛的速度了。為了增加檢測的準確性,有的還在馬路下面埋設環形線圈,比如大多數的十字路口,車輛通過會引起線圈磁場的電感量變化,并上傳給控制系統,以此滿足對車輛的準確檢測需要。能夠全天候地精確地檢測公路上的車輛行駛狀況,車輛類型,是拖車還是大貨車。
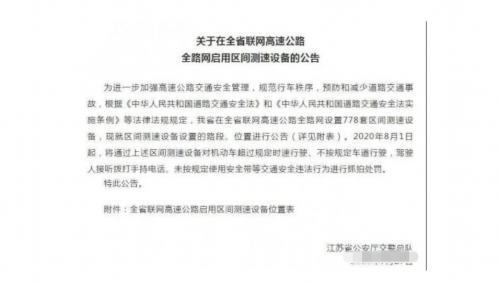
那么它具體是如何工作的呢?這里就先要簡單說下雷達的工作原理了。雷達是利用發射波和反射波之間的關系去探測物體的。雷達所用的波可以是聲波、超聲波、電磁波(包括微波)、紅外波等,雖然所有的波都可以用于雷達技術,但要根據不同的檢測目的和檢測對象去選擇不同的波。微波是一種電磁波,微波用于雷達技術是發揮微波特性的重要應用之一。微波雷達的檢測應用有很多,有用于檢測物體的距離和速度的,有用于定位的,有用于檢測云層氣象的,有用于探測地下結構的等等。
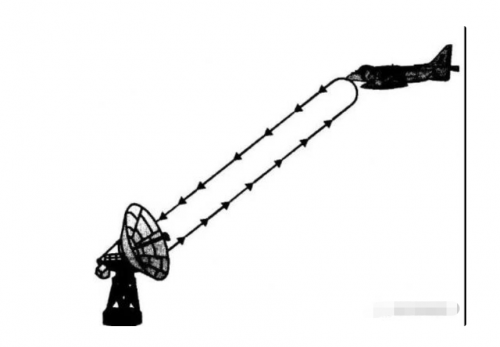
雷達技術用在汽車上比較常見的是防撞雷達。汽車防撞毫米波雷達防碰撞系統是以雷達測距、測速為基礎的。防撞雷達系統實時監測車輛的前方,當有危險目標(如行駛前方停止或慢行的車輛)出現,雷達系統提前向司機發出報警,使司機及時做出反應,同時雷達輸出信號到達汽車控制系統,根據情況進行自動剎車或減速。比如人站著不動,火車響著汽笛從遠處開過來,你會感到汽笛的音調越來越高,也就是汽笛聲音的頻率越來越高,當火車響著汽笛遠離而去時,你會發現汽笛的音調會由高變低,也就是汽笛聲音的頻率越來越低。
毫米波防撞雷達系統有調頻連續波(FMCW)雷達和脈沖雷達兩種。對于脈沖雷達系統,當目標距離很近時,發射脈沖和接收脈沖之間的時間差非常小,這就要求系統采用高速信號處理技術,近距離脈沖雷達系統就變的十分復雜,成本也大幅上升。因而汽車毫米波雷達防撞系統常采用結構簡單、成本較低、適合做近距離探測的調頻連續波雷達體制。
調頻連續波 FMWC 雷達優點:
? 因為使用更低功率,比脈沖雷達 價格低。
? 僅 1 個周期的發射信號就可以獲得目標物的速度與距離。
? 探測精度完全依賴于發射性能。
汽車毫米波雷達頻段:
? 79 GHz Sensors: BSD, PDS
? 77 GHz Sensors: ACC, CM
? 24 GHz Sensors: CM, BSD
24/26 GHz 頻段主要用于 (車輛間距確認等) ,而 77/79 GHz 頻段更重點用于(人與物體)的距離確認。
24 GHz 窄帶雷達頻率:-24.05 至 24.25 GHz,OBW:200 MHz,分辨率:1 至 3 m;
24/26 GHz UWB 雷達,OBW:4.5GHz,分辨率:10 至 15cm;(其中日本是用的 JPN : 22-29G, 24.25-29 GHz)
77GHz 波段雷達頻率:76GHz~77GHz,OBW:500 MHz 到 1 GHz,分辨率:1 到 2 米。
79 GHz 波段雷達頻率:77 至 81 GHz,OBW:4GHz,人與物識別。
對比 24/26GHz UWB 與 76GHz 雷達,79GHz 雷達具備更高分辨率。
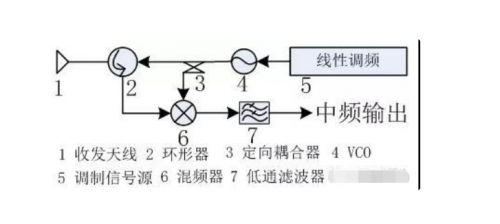
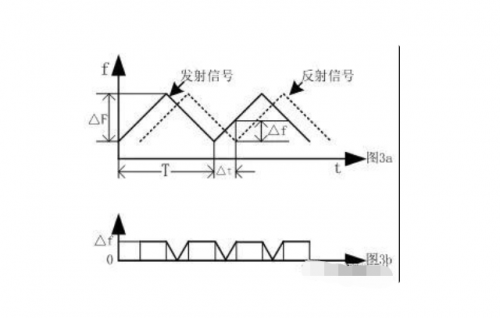
FMCW 汽車雷達系統包括天線、收發模塊、信號處理模塊和報警模塊或汽車制動裝置。雷達系統通過天線向外發射連續調頻毫米波信號,并接收目標的反射信號。發射波的頻率隨時間按調制電壓的規律變化。一般調制信號為三角波信號。反射波與發射波的頻率相同,只是在時間上有一個延遲△t,△t 與目標距離 R 的關系可表示為:△t=2R/c,其中 c:光速。延遲距離是發射器和物體距離的兩倍。
發射信號與反射信號在某一時刻的頻率差即為混頻輸出的中頻信號頻率△f。
根據三角關系可得出目標距離 R 為:R=△f*[c*T/(4△F)] ,也就是說,目標距離與前端輸出的中頻頻率成正比。
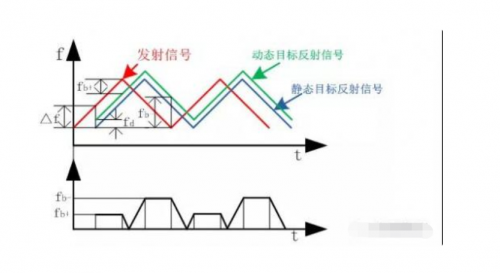
FMCW 雷達測距原理(對于運動目標)
如果反射信號來自一個相對運動的目標,則反射信號中包括一個由目標的相對運動所引起的多譜勒頻移 fd。
在三角波的上升沿和下降沿輸出中頻頻率可分別表示為:
fb+=△f-fd
fb-=△f+fd
其中 f:目標相對靜止時的中頻頻率;fd:多譜勒頻移,其符號與目標相對運動的方向有關。根據多譜勒原理,目標的相對運動速度 v 為:
v=(fb- - fb+)*c/(4*f0)
=λ(fb- - fb+)(5)
式中 f0:發射波中心頻率:發射波波長。
速度 v 的符號與目標相對運動的方向有關,目標靠近時 v 為正值,反之 v 為負。三角波上升沿和下降沿的中頻信號頻率由 DSP 進行 FFT 變換得到。
現在我們知道了雷達測速的基本原理是通過發射電磁波與接收電磁波的時間差來計算相對距離,同時是通過電磁波的照射來發現目標,那么問題來了,腦洞一下:如果殲 -20 低空飛過測速點,能測到速度嗎? 0)^_^(0