發布日期:2022-10-09 點擊率:107
0 引言
數控技術和數控裝備是工業現代化的基礎,它直接影響著一個國家的經濟實力和綜合國力,近年來,隨著數控技術的不斷發展,基于工業以太網技術的運動控制技術在一些機電一體化設備中得到了很廣泛的應用。Ether CAT(Ethernet for Control Automation Technology)技術,也就是以太網現場總線技術,是德國BECKHOFF公司提出的實時工業以太網技術,它具有通信速度快,數據量大,配置簡單等眾多優點,在當前很多工業控制領域得到了很廣泛的應用。本文基于Ether CAT技術,對永磁伺服電機的控制器進行了一定的研究。
當前,隨著生產現場的各運動設備的輸入和輸出節點不斷增多,并且,各個設備的運動都要有生產現場總控計算機來控制管理,生產設備上電機數量不斷增多,控制要求不但提高,當前普遍采用的方法是通過計算機進行遠程控制,而對于一些局部的或者是固定的運動參數,則由現場的設備進行獨立的控制,因此,該系統利用Ether CAT進行設計,可以很好的滿足系統整體上的穩定性和局部的實時性要求。
1 系統總體架構
基于Ether CAT的永磁伺服電機控制器系統采用主從式的結構,其總體結構如圖1所示:
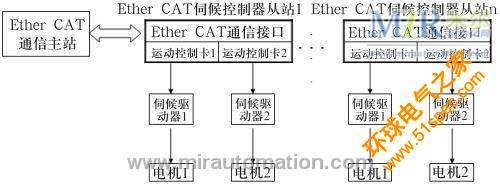
圖1 基于Ether CAT的永磁伺服電機控制器系統結構圖
如圖1所示,該系統由一個Ether CAT通信主站和若干個Ether CAT伺服控制從站組成,主站與各個從站之間通過Ether CAT進行連接,Ether CAT伺服控制從站的基礎是一塊控制地板,在控制底板上安裝有Ether CAT通信接口模塊,用于與主站和各個從站之間進行通信,另外,底板上還有兩個運動控制卡,而且,根據需要,可以在該底板上擴展更多的運動控制卡,通過每個運動控制卡控制一個伺服電機的運動。Ether CAT的控制底板采用Atmega128芯片作為它的控制芯片,而運動控制卡采用的是多功能的位置控制卡,可以很好的完成速度閉環控制、位置閉環控制等多個方面的工作。很好的滿足了本系統的要求。
2 系統通信
Ether CAT的通信方式相對于其他以太網和現場總線有了很大的區別,在幀的處理方式上,它突破了其他以太網解決方案的限制,為了滿足系統的需求,本系統在設計過程中,在應用層對Ether CAT的數據模塊結構進行了重新定義的過程。一般來說,數據模塊從總體上可以分成兩類,包括指令數據和狀態數據。這兩種數據模塊各有其不同的功能,在傳輸方式上也有一定的區別,指令數據的傳送方向是從Ether CAT通信主站到Ether CAT伺服控制器從站,用來通過控制器從站對伺服電機的運動進行控制,而狀態數據的傳送方向是從Ether CAT伺服控制器從站到Ether CAT通信主站,首先,主站通過Ether CAT對從站發送一定的命令,由從站發出相應的狀態數據,然后,由通信主站進行讀取,從而主站可以得到相應的伺服電機的狀態反饋。本系統中,每個運動控制卡都使用一個指令數據模塊和一個狀態數據模塊。而在指令數據和狀態數據傳送的過程中,處于Ether CAT網絡上的每個子報文都由各個Ether CAT從站上的所有的運動控制卡上的數據組成。
通信子報文的結構如表1所示:
表1 通信子報文結構

通信子報文中,首先是固定的報文頭部分,然后是每個Ether CAT從站上的每個運動控制卡上的指令數據和狀態數據。其中每個數據部分由十個字節構成,包含兩個字節的數據模塊頭部分,兩個字節的控制字/狀態字部分,用來區分該部分是狀態數據還是指令數據,最后是六個字節的指令數據區或狀態數據區。數據模塊的結構如圖2所示。
![]()
圖2 數據模塊結構示意圖
在以上數據模塊結構中,每個數據模塊頭占用兩個字節的空間,數據模塊頭中的內容包括運動控制卡的地址(4個位),工作方式(3位),握手位(1位)三個方面的信息。
利用以上通信報文結構,Ether CAT通信主站和從站之間通過進行周期性的通信過程來完成永磁伺服電機的控制過程。在通信過程中,通訊都是由主站發起的,兩個從站之間要進行通信,必須要通過主站進行,把主站當做一個路由器。主站和伺服電機控制從站之間的通信時序如圖3所示:
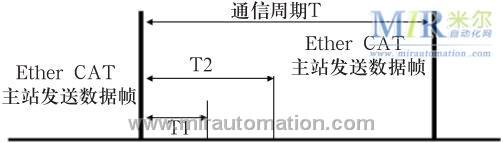
圖3 基于Ether CAT的伺服電機控制器通信時序圖
首先,Ether CAT通信主站根據相應的設置和命令發出數據幀,然后,伺服控制從站在T1之前讀取指令數據的內容,并從報文中分析尋址到本機的報文,讀取相應的控制命令,經過一定的運算之后,傳送到對應的運動控制卡模塊中從而對永磁式伺服電機進行相應的控制。
3 結束語
當前,基于現場總線網絡的伺服運動控制系統因為它的可靠性、快速性和穩定性等種種優點成為當前伺服控制系統的發展趨勢。本文針對基于Ether CAT的永磁伺服電機控制器進行了一定程度研究。在應用層對數據傳輸的子報文結構進行了相關的設計,經過實際驗證,能夠很好的滿足系統的要求。本文僅僅對系統的主要部件進行了一定的研究,對于該控制器運動控制方法上的多控制器以及大型運動控制系統的構成還需要更進一步的研究。
下一篇: PLC、DCS、FCS三大控
上一篇: 索爾維全系列Solef?PV

型號:M2D068-DF
價格:面議
庫存:999
訂貨號:M2D068-DF


